ここからは、フィードバック制御におけるコントローラの役割、コントローラの設計法
について紹介していく。コントローラの挿入場所、 コントローラの伝達関数、係数の
チュー二ングの方法、コントローラの実現の例などについて説明する。
PIDコントローラ、位相遅れ・進みコントローラのチューニングの方法を具体的に紹介する。
与えられる閉ループシステムそのものに直接フィードパックを施すと、第49回で述べた
ように、
① 不安定になる
② 大きな最大行過ぎ量をもつ
③ 応答時間が遅い
④ 大きな定常偏差をもつ
などがある。
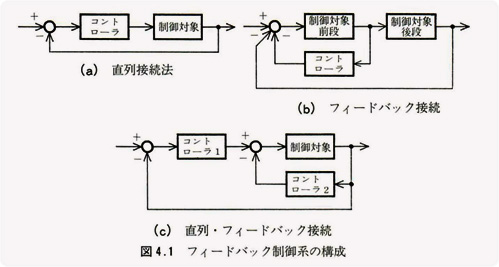
直列接続法は、例えば図4.1(a)のブロック線図に示したように、制御対象に直列に
コントローラを挿入する方法である。これに対してフィードパック接続は図4.1(b)の
ブロック線図で示したように、制御対象前段にコントローラをフィードパックする方法
である。直列・フィードパック接続法は、上の両者を並用する方式であり、図4.1(c)
に示す接続になる。この方式は、フィードパック系の入出力の特性だけでなく、外乱
から出力までの特性も改善するので広く利用されている。
いずれの場合も、コントローラはパワーレベルの低いところに挿入されるべきで、
例えば増幅器の入力側に挿入される。また、フィードパック接続の場合には、
パワーレベルの高いところから低いところに向かって挿入すべきである。その逆方向
に挿入する必要のある場合にはコントローラの内部に増幅器を使用しなければならない。













