システムが可制御性であるとき、制御入力列の選び方次第である任意の状態x(0)
にあるシステムをまったく別の任意の状態xfに移行できる。
今、式(3.43)で記述される離散システムにおいて、このような制御入力列を求める。
このとき、式(3.43b)の行列のランクがηであることが前提になることを示す。式(3.43a)
![]()
の方程式を解くと次のようになる。
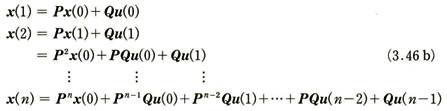
上式より、x(n)の値は![]() から定まることがわかる。
から定まることがわかる。
今、x(n)=xfとなるような制御入力列![]() を求める。
を求める。
この入力列は、上式より、
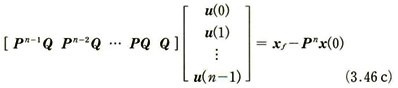
の連立方程式を解くことで求まる。この方程式が解をもつための条件は、
![]()
である。この条件は式(3.43a)のシステムが可制御である条件でもある。よって
システムが可制御であれば、制御入力のn回の操作![]()
でシステムの状態をx(0)から任意に与えられる状態xfに移行できる。
![]()
![]()
![]()
可制御性行列は、
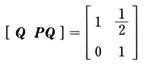
である。この行列の行列式は0でないので、この行列のランクは2であり、システムの
次数に等しい。よってこのシステムは可制御である。
式(3.46c)に相当する方程式を求める。
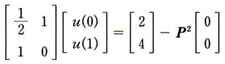
この方程式の解はu(0)=4、u(1)=0となる。この入力を与システムの入力列として印加すると、
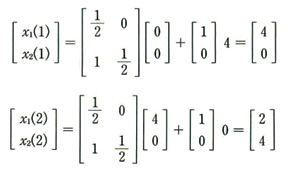
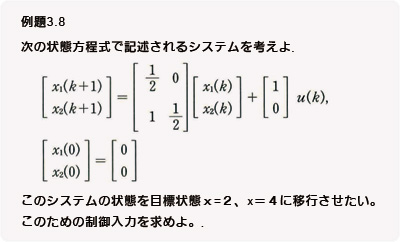
となり、2ステップ目には状態は目標状態に移行している。













