n×n の正方行列Aについて固有値、固有ベクトルを定義する。行列Aにおいて、
![]()
を満たす![]() をAの固有値という。
をAの固有値という。
![]()
を満たすn次元ベクトル![]() を固有値λiの固有ベクトルという。固有値λi、
を固有値λiの固有ベクトルという。固有値λi、
![]() が重複しないかぎり、固有ベクトル
が重複しないかぎり、固有ベクトル![]() nは線形独立
nは線形独立
であり、この n 個のベクトルを利用して、
![]()
なる行列をつくり、A行列を次のように変換すると、X(s)を消去すると
なる対角上に要素が並ぶ対角行列が求められる.次に、固有値、固有ベクトルと
状態方程式の関係を考える。状態方程式で記述されるシステムの伝達関数は、
式(2.33b)で与えられる。この式より、伝達関数の分母の多項式=0とおいたシステム
の特性方程式は、
![]()
で与えられる。式(2.34a)と(2.34e)を比較すると、システムの特性根は、状態方程式の
係数行列Aの固有値に対応していることがわかる。システムの特性根はA行列の
固有値であり、これらは実数あるいは共役の複素数である。
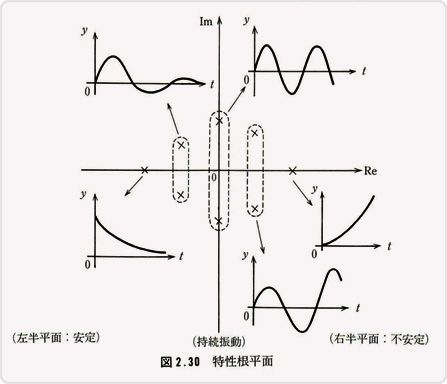
この特性根をプロットした複素平面は特性根平面とよばれ、虚軸より根が左側にある
(特性根の実数部が負の)場合、安定な挙動を示す。また虚軸上に根がある場合、
この根は持続振動を示す。特性根が右半平面上にあるときは不安定な挙動を示す。
このようすを図2.30に示す。
行列Tを用いて次のようなベクトルを定義する。
![]()
上式を式(2.29c)の状態方程式に代入すると、

なるz(t)に関する状態方程式が得られる。式(2.34d)よりT-¹ ATはシステムの特性根が
行列の対角上にあり、非対角要素は0となる特別な状態方程式になっている。
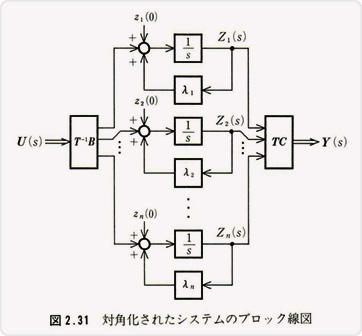
このような方程式は対角化された状態方程式と呼ばれ、
制御系の解析によく使われる。この状態方程式からブロック線図を構成すると図2.31の
ようにきわめて簡潔な型になっている。