1入力1出力システムが次の伝達関数
![]()
で与えられているとする。このシステムの状態方程式を求める。この伝達関数を
比例要素と積分要素に分解したブロック線図は、図2.24(a),(b)に示す。
この分解されたブロック線図より、第40回で述べた手順で状態方程式を求める。
図2.24(a)の可観測標準形ブロック線図より
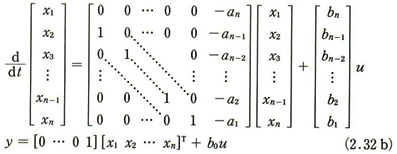
なる可観測標準形の状態方程式が求まる。また第25回の図2.24(b)の可制御標準形
ブロック線図より
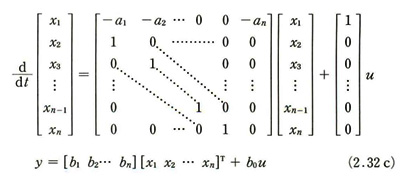
なる可制御標準形の状態方程式が求まる。
逆に、状態方程式が与えられ、それから伝達関数を求める.状態方程式のラプラス
変換式(2.31c)において、初期値Xo=0として、状態X(s)を消去すると
![]()
となる。これより、伝達関数G(s)は、次のようになる。
![]()













