システム変数のうち、異状に直接かかわる
変形を測定することができない場合、6・1・1で
述べた間接測定法によりその変数を求めなければ
ならない。間接測定法を系統的に理論づけた方法が
状態推定法である。以下従来から制御工学の分野で
使用されてきた状態推定法、異状検知診断に
方向づけた状態推定法について述べる。
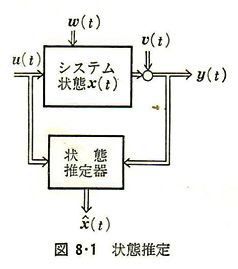
8・1 状態推定法とは
図8・1に示すようなシステムを考えよう。
このシステムにおいて、システムに印加される
入力u(t),システムからの出力y(t)が測定され、
システムノイズw(t)、測定ノイズv(t)の統計的
性質およびシステムに関する情報(システムなどの
モデル)が与えられているとする。状態推定法とは、
これらの全情報あるいは部分情報を利用して直接測定
出来ない状態、測定できるがノイズで乱されている
状態を正しく推定する方法である。
状態推定法でよく知られ広く応用されているものは
カルマンフィルタとルーエンバーガ観測器である。