式(5.6a)の同一次観測器は、システムの次数と等しい次元を必要とした。
一般には観測器の次元はもっと下げることができる。いまm入力、l出力の
状態方程式で記述される可観測なシステム
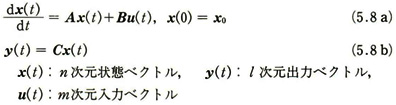
の観測器の次数は(η-l)まで下げることができる。このような観測器は、
最小次元観測器とよばれる.。一般に、
において、次の3条件、

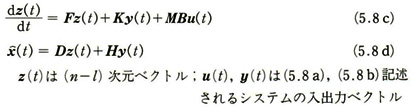
を満たす場合、式(5.8c)、 (5.8 d)はシステム (5.8a)、 (5.8 b)の観測器であり、
![]() は
は![]() の推定値となり、t→∞とともに
の推定値となり、t→∞とともに![]() となる。式(5.8c)~
となる。式(5.8c)~
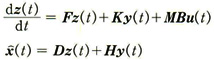
(5.8 f)におけるA、B、Cはシステム(5.8a)、(5.8b)の係数行列である。式(5.8c)、
(5.8d)で与えられる観測器はルーエンパーガ(Luenberger)型の観測器と
よばれている。
ここで、式(5.8c)、(5.8d)において、t→∞とともに![]() となることを
となることを
証明する。いま、
![]()
とおく、上の左側の両辺を微分し、
![]()
に式(5.8a)、(5.8b)、(5.8c)を代入する.式(5.8e)、(5.8 f)の関係を利用すると、

を得る。この上式の解は
![]()
![]()
ここで、上式の各行列の大きさ
![]()
とする。行列Cは(5.8b)で与えられ、行列H、DはM が定められると自動的に定まる。
いま、式(5.10a)の行列を利用して、式(5.8a)の状態方程式を線形変換する。
すなわち変換される状態変数を次のようにする。
![]()
あるいは
![]()
ここで式(5.10b)、 (5.10c)におけるy(t)は式(5.8b)で与えられるシステムからの
出力変数である。式(5.10b)、 (5.10c)を式(5.8a)に代入すると、
![]()
を得る。上式の第2番目のz(t)に関する方程式のみを取り出すと
![]()
を得る。いま式(5.10d)において、
![]()
とおき、式(5.10c)の![]() を
を![]() とおくと、これらの式は、
とおくと、これらの式は、
となり、式(5.8c)、式(5.8d)のルーエンパーガ型最小次元観測器とまったく同じ式
になり、かつ式(5.10a)は式(5.8f)を満たし、式(5.8f)と式(5.11e)より式(5.8e)を求める
ことができ、観測器の3条件のうちのはじめの2条件を満たす。さらに式(5.10e)より
F、Kは式(5.10a)のMが定まれば、自動的に定まる。
よって、式(5.8c)、(5.8d)の観測量の係数H、D、 F、 K、MBは次の手順から求められる。
![]()
とし、観測器の第三条件を満たすため、
![]()
の全固有値が負となるようなMを定め、上式よりH、Dを決める。
![]()
![]()
![]()
![]()
n=2、l=1であることより、この観測器の次数は(n-l)=1となる。M=[m1 m2]とすると、
![]()
となり、
![]()
となる。
いま m1=3.5、m2=4.5とすると F=-10となる。また、
![]()
となり、さらに、
となる。よって、F=-10の最小次元観測器は次のように求まる。