レギュレータ設計において、状態の一部しか計測されない場合、第76回で述べた
観測器によって全状態を推測し、第65回で述べた方法で状態フィードバックを施せばよい。
![]()
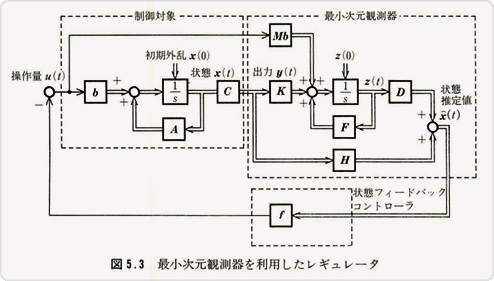
ここで![]() は観測器出力である.この観測器を利用したレギュレータのブロック線図を
は観測器出力である.この観測器を利用したレギュレータのブロック線図を
図5.3に示す。システム式(5.1a)、 (5.1 b)、観測器(5.8c)、(5.8 d)および式(5.11a)の
状態フィードバックをまとめた閉ループは、

ここで、
![]()
の状態変数変換すると、 (5.11 b)、 (5 .11 c)の閉ループ系は、
![]()
となり、閉ループ系の特性根はA-bfの固有値とFの固有値となる。よって、観測l器の
特性根(Fの固有値)riをレギュレータの特性根(A-bf)の固有値)μi、よりも複素平面上
のより左側に設定すれば、閉ループ系の特性根はほぼA-bfの固有値によって左右
され、レギュレータとしての目的が達せられることになる。













