第76回では状態フィードパックによって可制御なシステムのすべての特性根を
任意の値にすることができることを示した。 ところが、実際のシステムでは
すべての状態が測定できることはまれである.状態観測器とは、可観測lな
システムの入出力の計測データからすべての状態変数を推定するフィルタの
ことである。いま、式(5.1a), (5.1b)で記述されるシステムが可観測であるとする。
このとき次の状態方程式で記述されるフィルタは、
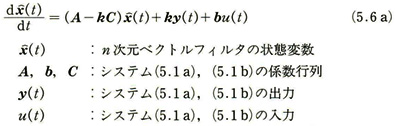
もしもこの状態方程式が安定であり,A-kCのすべての固有値(フィルタ状態
方程式の特性根)の実部~がすべて負の場合、 t→ ∞で、
![]()
となりフィルタの状態![]() はシステムの状態に漸近的に近づく、このような
はシステムの状態に漸近的に近づく、このような
フィルタを同一次元観測器とよんでいる。フィルタの出力が漸近的にx(t)に
近づくことは次のように証明される。いま、フィルタの状態![]() とシステムの
とシステムの
状態x(t)の誤差を
![]()
とおく。両辺を時間で微分し、式(5.1a)、(5.1b)、 (5.6a)を代入すると、
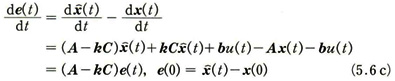
となる。この誤差に関する方程式の解は、
![]()
となり、(A- kC)の固有値の実数部がすべて負であることより、t→ ∞に伴い
e(t)→0となる。よってt→∞に伴い![]() となる。
となる。
システム(5.1a)、 (5.1 b)が可観測であることより、(A -kC)のすべての固有値は
kの選び方によって任意の値にすることができる。いま(A-kC)の固有値を
![]() とするkは次の手順によって決められる。
とするkは次の手順によって決められる。
① 式(5.5e)
![]()
より、係数a1~anを求め、状態方程式を可観測標準形に変換する変換行列Toを
式(5.4a)より決定する。
②次式
![]()
より係数d1~dnを求める。
③係数ベクトルk

より与えられる。













