式(3.32),(3.36)のようなむだ時間要素をフィードバックループ中に含めると、その
フィードバック系は容易に不安定に陥ったり、システムの解析的取扱いがやっかい
になる。そこで、むだ時間を短くすることはあきらめ、むだ時間要素をフィードバック
ループの外に追い出し、むだ時間だけ過ぎた後の応答を良くする方策が考えられる。
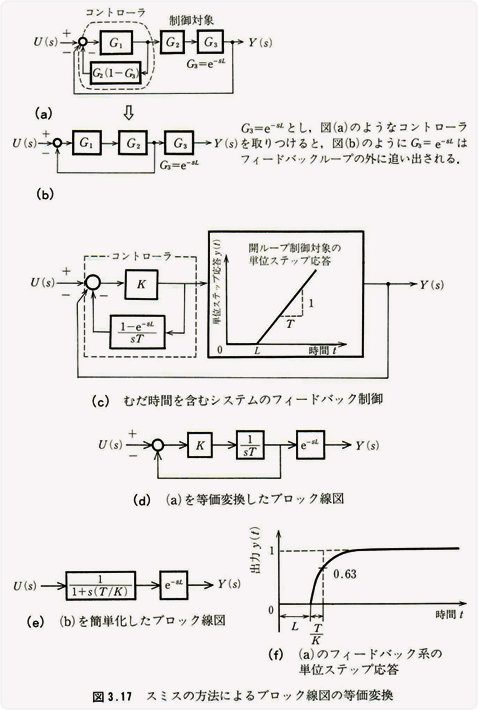
第34回「ブロック線図の簡約化」でブロック線図の等価変換の例として図2.22にスミス
の方法を示した。この方法を利用して、むだ時間要素をフィードパックループの外に
追い出す。図2.22の等価変換の結果を図3.17にまとめて示してある。
図3.17(a)で破線で固まれた部分はコントローラ、G2、G3は制御対象で、
例えば式(3.32)の場合、
![]()
式(3.36)の場合
![]()
とし、![]() と考えればよい。図3.17(a)のようなフィードバック系は同図(b)と
と考えればよい。図3.17(a)のようなフィードバック系は同図(b)と
等価となり、フィードバックループの外に![]() が追い出されている。
が追い出されている。
伝達関数G1(S)はG3(S)をループの外に追い出した後のフィードバック系の特性を
改善するための伝達関数である。この方法はスミスの方法とよばれ、むだ時間を
含む系のフィードバック制御によく使われる技術である。
![]()
![]()
![]()
単位ステップ応答波形より、制御対象の伝達関数は、
![]()
で与えられる。よって図3.17(a)、(b)より、この制御系は図3.17(d)に示すブロック線図に
等価変換できる。これは、さらに図3.17(e)のように変換でき、一次遅れ要素1/{1+s( T/K)}
とむだ時間要素![]() の直列接続系となる。
の直列接続系となる。
よって、このフィードバック系の単位ステップ応答は図3.17(f)のようになり、Lのむだ時間、
一次遅れ要素の応答になっている。この系の位置定常偏差はOであり、まだこの一次
遅れ要素で与えられる系の時定数はコントローラの係数Kによって自由に調整できる。













