ここからは、フィードバック制御システムの性能の評価の方法について述べる。
フィード パック制御の性能は、入力が変化したり、外乱が加わった直後の
システムの過渡的特性、入力変化後十分時間が経過した後の定常特性、安定性、
および可制御、可観測性などから調べられる。
これらの特性は周波数応答、ステップ応答などの実験結果から評価する方法、
および伝達関数、状態方程式から評価する方法があり、これらの方法について述べる。
フィードパック制御は、劇薬に例えられる。適切に用いると、大きな効果を発揮するが、
誤って用いると、システムの性能を大きく劣化させる。フィードパック制御系の性能に
関わる特性は、次のように大別できる。
① システムの安定性
② システムの定常特性
③ システムの過渡特性
①のシステムの安定性とは、システムにフィードパック制御を施すことで、システムの
安定性が保たれるかあるいは、不安定になってしまうかの特性である。誤ってフィード
パック制御を用いるとシステムは不安定になってしまうことがある。
図1.6に示したようにフィードパックはシステムの出力信号を入力に戻す信号流れ
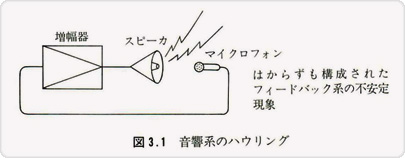
系である。図3.1にフィードパック制御系ではないが、はからずもフィードバック信号流れ
系となった一例を示す。多くの読者が経験あることと思うが、図3.1の系では、スピーカ
は聞くに耐え得ない。
大きな高周波音(ハウリング)を発生する。これは、このフィードパック系が不安定に
なったために発生される音で、これをフィードパック系の不安定現象という。誤った
フィードパック制御を施すと、図3.1のような不安定な現象は容易に起こりうる。
②のフィードパックシステムの定常特性とは、入力に信号を加え、あるいは外乱が
加えられて十分時聞が経過した後のシステム状態に関する特性である。
たとえば図3.2に示すようにロボットの腕をある所定の位置に移動し静止させたいような
場合、この腕が静止した後、その位置が所定の位置からどれだけずれているかを、
評価する場合に用いられる。
③の過渡特性とは、制御系に入力あるいは外乱が加えられ、定常状態に到るまでの
間の過渡的な特性を意味する。たとえば図3.2のロボットの腕の制御で、A点からC点に
移動し静止させるためには、経路は直線ACで、しかも最短の時間で移動することが
理想的である。しかし、実際にはロボット腕の慣性モーメン卜のためや、腕を動かす
モータの性能や電源の限界から理想的な経路を最短では移動できない。
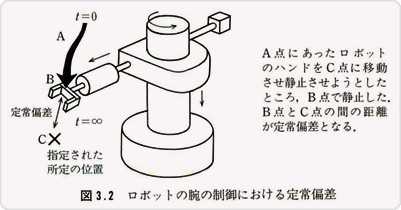
理想経路から大幅にずれたり、静止するのに長時間を要したり、不必要な振動を
起こしたりする。このような特性が過渡特性と呼ばれる。 フィードパックコントローラは、
フィードパック系が安定に、定常誤差を少なくし、理想的な過渡特性をもつように設計
されなければならない。以下、フィードパック系の定常特性、過渡特性、フィードパック系
の安定性の判別法について述べる。













