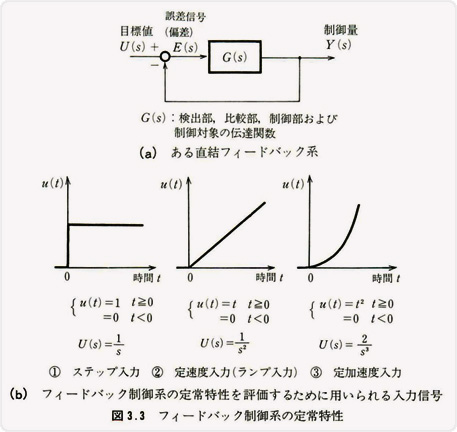
図3.3(a)に示してあるフィードパック系を考える。フィードパック信号線の中に
伝達関数を介することなく出力から直接入力に信号が戻るシステムは直結
フィードバック系と呼ばれている。フィードパックループの中に入っている
伝達関数G(s)には、検出、比較、制御部、制御対象全体の特性を表している。
このような伝達関数は一巡伝達関数と呼ばれている。いま、このようなフィード
パック制御系に図3.3(b)に示すような入力① ステップ入力、② 定速度入力
(ランプ入力)、 ③ 定加速度入力を印加し、十分時聞が経過した後の入力と
出力の間の偏差、すなわち、定常偏差を求めることにする。 図3.3(a)より目標値
から偏差までの伝達関数は次のように求まる。
![]()
よりY(s)を消去して、
![]()
となる。定常偏差esは、式(3.3)をラプラス逆変換して得られるe(t)でt→∞としたもの
であり、これは第3回~5回で示したラプラス変換の最終値定理から、次のように
得られる。
![]()
これより、システムの一巡伝達関数G(s)と入力のラプラス変換U(s)が与えられると、
その定常偏差を求めることができる。
① ステップ入力を印加する場合
入力は単位ステップであることから、図3.3(b)よりU(s)=1/s、これを式(3.4)に代入し
![]()
となる。ここで係数![]() を位置定常偏差定数と呼び、この場合の
を位置定常偏差定数と呼び、この場合の
定常偏差1/(1+ Kp)を位置定常偏差(オフセッ卜)という。
② 定速度入力を印加する場合
入力が定速度入力であることから、図3.3(b)よりU(s)=1/s² 。これを式(3.4)に代入し
![]()
となる。ここで係数![]() を速度定常偏差定数といい、この場合の
を速度定常偏差定数といい、この場合の
定常偏差1/Kvを速度定常偏差という。
③ 定加速度入力を印加する場合
入力が定加速度であることから、図3.3 (b) よりU(s)=2/s³ これを式(3 .4 )に代入すると
次式を得る。
![]()
ここで、係数![]() を加速度偏差定数といい、この場合の定常偏差
を加速度偏差定数といい、この場合の定常偏差
2/Kaを加速度定常偏差という。
一巡伝達関数が次式で与えられる場合
![]()
Kをゲイン定数といい、分母のsのべき乗![]() が
が![]() =0,1,2の場合、それぞれ0形、
=0,1,2の場合、それぞれ0形、
1形、 2形の制御系という。これらの制御系の定常偏差は表3.1に示すようになる。
この表は,たとえばステップ応答に対してはl形の制御系であれば位置定常偏差は
必ず0になり、目標値と制御量を一致させることができることを示してある。
この表より定常偏差はゲイン定数Kの大きさに逆比例し、形数![]() に逆比例することが
に逆比例することが
わかる。
しかし、以後紹介する開ループ周波数特性による安定判別で述べるように、ゲイン
定数Kを大きくし形数![]() を増すと、制御形は不安定になりやすく、定常偏差の立場
を増すと、制御形は不安定になりやすく、定常偏差の立場
だけから必要以上にKを大きくしたり、形数![]() を増すわけにはいかない。
を増すわけにはいかない。













