図3.3(a)のようなフィードパック制御系で、 目標値u(t)を単位ステップ状に
変化させた場合、その出力波形は図3.4(b)のように、非振動的に一定値に
収束する場合と、図3.4(b)のように減衰振動しながらある一定値に収束する
場合がある。図3.4(a)の応答はしばしば一次遅れ伝達関数
![]()
で近似され、図3.4(a)の波形におけるTを時定数、Kを比例ゲインとよぶ。
図3.4(b)の応答の![]() は次のように定義される。
は次のように定義される。

① θ:最大行過ぎ量(オーバシュート量)
パーセント最大行過ぎ量=[(最大ピーク値-最終値)/最終値]x100%
② Tmax:最大行過ぎ時間
出力が最大ピーク値に致るまでの時間
③ es :位置定常偏差(オフセット)
定常状態における目標値からの制御量の差
④ Td :時間遅れ
応答定常値の50%に達するのに要する時間
⑤ Tr:立上り時間
応答定常値の10%から90%までに立ち上がるのに要する時間
⑥ Ts:整定時間
応答が減衰して定常値のたとえば5%以内の値にとどまるようになる ために要する時間
このようなオーバシュートをもつ波形は、式(3.10)で表される二次遅れ系のステップ
応答波形で近似できる。
![]()
式(3.10)においてωnは固有角周波数、ζは減衰係数とよばれる。いま、 ωn、ζと
パーセント行過ぎ量θ、最大行過ぎ時間Tmaxの関係を求める。式(3.10)の伝達関数
の単位ステップ応答は表2.1のラプラス変換表の変換32より、0≦ζ< 1 の場合
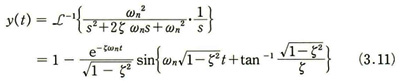
となる。この関数y(t)の極値はdy(t)/dt=0を満たす時刻tで現れ、その時刻は
次のように求まる。
![]()
このうち最大値はn=1の時刻で現れる。よって最大行過ぎ時間Tmaxは、
![]()
となりパーセント最大行過ぎ量は、

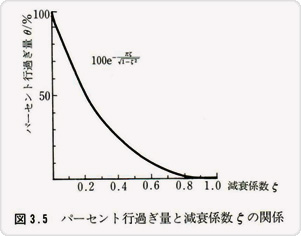
と求まる。これよりパーセント行過ぎ量はζだけの関数となっていることがわかる。
パーセント行過ぎ量とζの関係を図3.5に示す。