状態方程式とはシステムを1階連立常微分方程式で表したもので、一般に
次式のように表すことができる。
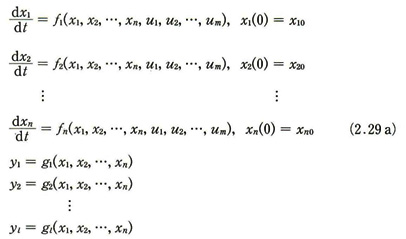
ここに![]() は状態変数、
は状態変数、![]() は出力変数
は出力変数![]() は
は
制御変数あるいは入力変数と呼ばれ、それぞれシステムの内部の状態、 システムの
出力、システムに加える制御入力を表している。式(2.29a)はベクトル記法を用いて、

と表すことができる。式(2.29a)、(2 .29 b)は、一般に非線形システムも表すことができる
状態方程式である。
今、式(2.29a)のfi、giがxj、yjの線形関数で与えられるとき、式(2.29a)あるいは、式(2.29b)
の関数f(x,u)、 g(x)は、

で表現できる。この方程式についてはすでに式(2.2)で詳しく述べてある。
式(2.29b)のような常微分方程式で記述される非線形状態方程式の数学的取り扱いは
非常に困難であり、いまだわかっていることより、わかっていないことの方が多い。
また通常制御の目的では、線形方程式で取り扱うだけでもかなりの効果があるので、
以後、線形システムに限定して議論を進める。













