ここで
D:n×m次元定数係数行列でk0が定まれば自動的に定まる
H:n×(n-m)次元定係数行列でDと同じくk0が定まれば自動的に定まる
式(8・26)により線形変換された新しい状態ベクトルを
利用してシステム式(8・25)を置き換えると
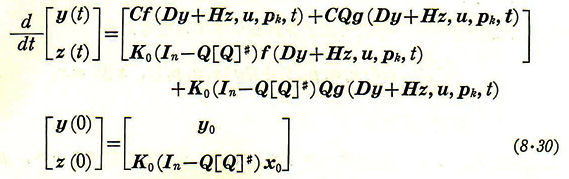
上の第二番目の式に置いて

であることより式(8・30)の第2式は

となり、これは未知パラメータpを含まない。いま、システムの
非線形関数f(Dy+Hz、u、pk、t)がz(t)に関して線形の場合、
式(8・32)は次のようになる。
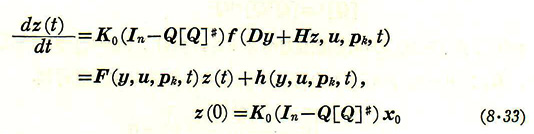
ここで、F(y、u、pk、t):(n-m)×(n-m)次元時変形行列、
h(y、u、pk、t):(n-m)次元時変形ベクトルであり、
式(8・33)は時変形線形常微分方程式で記述される。
いまF(y、u、pk、t)を係数行列としてもつ次の微分方程式

がすべてのu(t)に関して安定である場合、次式の時変形線形常微分方程式

はシステム式(8・25)の状態観測器である。ここでz0は任意ベクトルで
観測器の初期値である。













