(1)保全を伴わない場合
いま図4.7に示すような保全を、伴わない待機冗長システムを考える。
この待機の方式は次のとおりである。
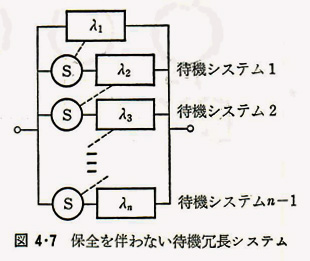
i)はじめのシステムは故障率λ1で稼動している。待機システム1は信頼度1で
待機している。
ii)はじめのシステムが故障すると、故障検知スイッチSが動作し、待機中の
待機システム1は故障率λ2で稼動しはじめるとともに、待機システム2が
信頼度1で待機状態に入る。
iii)待機システム1が故障したら、ii)と同様に待機システム2が故障率λ3で
待機状態に入る。
以下、待機システムが故障するごとに同様な操作が繰り返され待機システム
(n-1)が故障するまでシステムが正常な機能を果たす。
iv)故障検知スイッチSの信頼度は1とする。
この場合のシステム全体の信頼度を求めてみる。はじめに次の確率を定義する。
p0(t):はじめのシステムが正常である確率
p1(t):はじめのシステムが故障し、待機システム1が稼動しはじめた。
このとき待機システム1が正常に動作する確率
pi(t),i=2,3,……,(n-1):待機システム(n-1)が故障し、次の待機システムiが
稼動しはじめた。このとき待機システムjが正常に動作する確率
pn(t):全システムが故障する確率
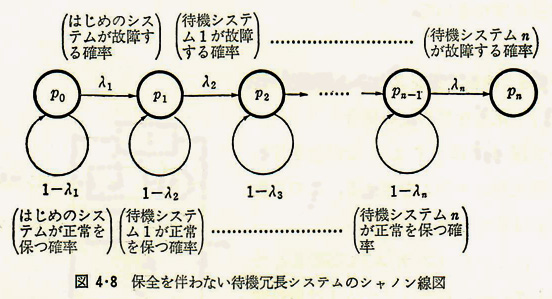
これらの確率を用い、上述i)~iv)の待機方式より図4.8に示すシャノン線図が
作られる。式(4.50)と図4.5の関係、さらに式(4.49)を用いると、図4.8の
シャノン線図から確率推移行列が次のように求められる。
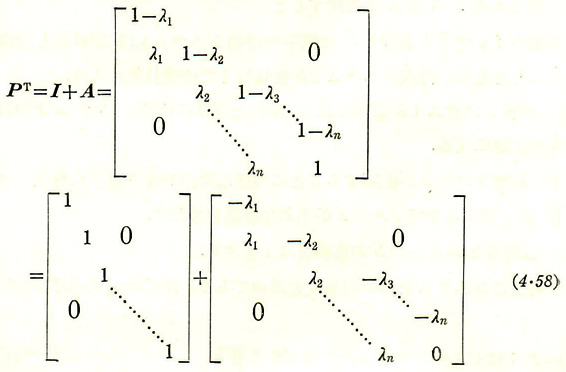
これより、
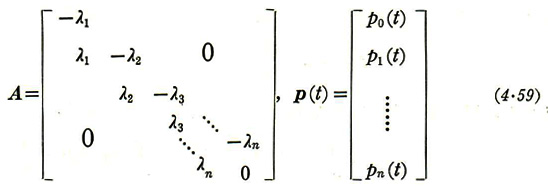
とすると、この待機冗長システムの信頼性を表す確率状態方程式は
![]()
で与えられる。システムの信頼度は、pi(t),i=0,1,2,..,nの定義より、
pn(t)を除くすべての確率の和で与えられることより
![]()
とすると次のように与えられる。
![]()
いま例えばはじめのシステム、待機システムの故障率はすべて等しくλとする。
この場合行列Aの固有値は0,-λ,-λ,…・・・-λとなる。補1に示した方法を
利用するか、直列![]() にAを代入するとp(t)
にAを代入するとp(t)
は次のようになる。
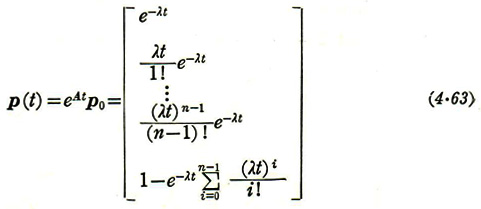
したがって、この待機冗長システムの信頼度は
![]()
となる。上式よりR(∞)=0となり、これは保全がないことから時間が十分経過
すると、システムはすべて故障してしまうことを示している。式(4.64)のR(t)
よりMTTF(寿命)を求める。式(3.6)より故障時間の密度関数は

となり、MTTF(寿命)は式(3.20)より次のように求まる。

はじめのシステム1台だけのMTTFはn=1とした場合であり、MTTF=
1/λとなるのに対し、i)~iv)で述べた(n-1)段の待機冗長方式をとると
n倍だけMTTF(寿命)が延びることを示している。
(2)保全を伴う場合
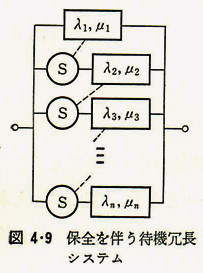
図4.9に保全を伴う(n-1)段の待機冗長システムを示す。はじめの
システムの故障率をλ1、修復率をμ1、第i待機システム(i=2,3,……,n)の
故障率をλi、修復率をμiとする.いま、この保全を伴う方式は、保全を
伴わない場合のi)~iv)に加え、第(i+1)待機システムが稼動中,第i
待機システムが修復され修復が完了したら第i待機システムにもどる
こととする。いま
p0(t):はじめのシステムが正常である確率
pi(t),i=1,2,……,(n-1):第i+1待機システムが正常である確率
pn(t):システム全体が故障している確率
と確率変数を定義する。図4.8を求めたのと同様にして、この場合の
シャノン線図は図4.10のようになる。いま
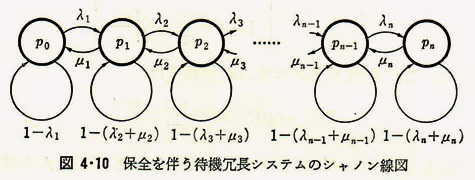
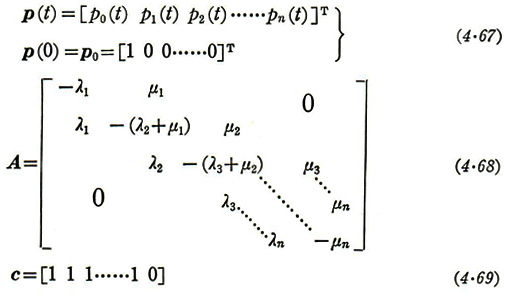
とベクトル、行列を定義すると、保全を伴う待機冗長方式によるシステムの信頼性を
表す確率状態方程式は次式で与えられる。
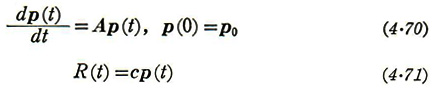
行列Aはシャノン線図より、行列cは、全体としてシステムが稼動し得る確率は
p0(t)+p1(t)+……+p(n-1)(t)であることより求められた。.この方程式を解き
R(t)を求めると瞬時アベイラビリティが得られる。定常アベイラビリティは
式(4.45)を利用して、
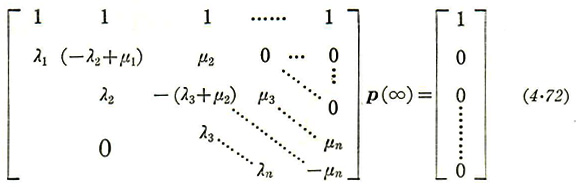
の代数方程式の解より
![]()
式(4.70)、(4.71)の確率状態方程式は待機冗長システムの一般形であり、
修復率μi=0、i=1,2,……,nとすれば保全を伴わない場合の状態方程式
(4.60)に一致する。一般に保全のない場合でモデルを作っておけば、
修復率μi=0とすることで、保全のない場合のモデルが作られる。













