式(4.25)の独立変数は時間であり、この単位長さは同じ単位を持つMTBF、
MTTRに比して十分小さいと考えられる。式(4.25)の過渡現象の速さは、
MTBF、MTTRから大きくかけ離れたものではない。したがって,式(4.25)
の微分は
![]()
で十分精度よく近似でき、式(4.25)は
![]()
あるいは
![]()
と近似的に書き換えることができる.ここでkはk単位時間とする.式(4.48)
のI+Aを次のように定義する。
![]()
この行列Pはシステムの信頼性の時間的推移を表す確率推移行列と呼ばれ
ており、式(4.48)は,次のように表すことができる。
![]()
この差分方程式は確率状態推移方程式と呼ばれている。この方程式はk単位
時刻における確率ベクトルp(k)は1単位時間後p(k+1)に推移し、推移の仕方
はPTによって決まることを意味している。確率ベクトルp(k)の全要素の和は1で
あり式(4.28)の性質が保存される。式(4.50)のブロック線図は図4.5(a)の
ようになる。
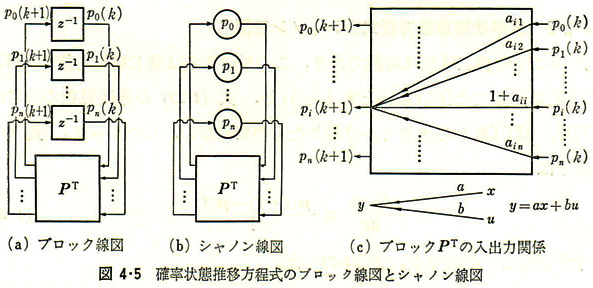
図4.5(a)においては、z-1時間シフト演算子でz-1-,pi(k+1)=pi(k)で定義
されるものである。
すなわち,1単位時間の遅れ素子と同じ役割を果たす。
図4.5(a)の![]() を
を![]() で置き換えた
で置き換えた
図が図4.5(b)であり、システムの正常、故障あるいはバックアップシステムの
正常、故障の確率の推移の様子を表したものでシャノン線図と呼ばれている。
図4.5(a)、(b)のPTの内容は図4.5(c)に示されている。
以上、複合システムの信頼度、アベイラビリティ解析、評価のための幾つか
のモデル、線図、計算法について述べた。次に具体的例でシステムのアベイラ
ビリティ、信頼度を評価する。













