複合システムのアベイラビリティ、信頼度を解析、評価するためのモデルは
システムの各要素の故障率、修復率、システム機能を実現するための要素の
組み合わせ方の情報から作られる。このモデルは式(4.12)、(4.13)と
同様に線形連立常微分方程式で記述され次式のように与えられる。

ここで、p(t)は(n+1)次元変数ベクトル、p0は(n+1)次元定数ベクトルで、
式(4.25)の初期値、Aは(n+1)×(n+1)次元の行列、一般にこの要素は
時間tの関数であるが、ここでは定係数行列とする。cは1×(n+1)次元の
定係数行列、R(t)はスカラ変数でp(t)の線形結合で与られる。
式(4.25)、(4.26)は制御理論において、複雑なシステムを表現する場合に
使われシステムの状態方程式(state variable equation)と呼ばれている。
またP(t)は状態変数(state variable)と呼ばれる。ここではp(t)は信頼性
に関する確率であり、その意味で式(4.25)、(4.26)を確率状態方程式、
p(t)を確率状態(変数)ベクトルと呼ぶことにする。式(4.25)が信頼性に
関する確率を状態として持つ方程式であることより、p(t)、Aは特殊な性質
を持っている。ベクトルp(t)、スカラR(t)は次のように定義される。

ここで、p0(t):システムが無故障の状態にある確率、pn(t):バックアップ等
すべてを使用した上でシステムが故障している確率、p1(t)~pn-1(t):シス
テムの構成によって定義される確率、例えば並列冗長システムの場合、冗長
部によりシステムが正常である確率。
p(t)の要素である確率をすべて加え合わせたものは常に1となり次式が成
り立つ。
![]()
さらに時刻t=0において、システムは無故障であったと仮定して

とする。
R(t)はシステムのアベイラビリティ(保全ありの場合)、あるいは信頼度
(保全なしの場合)を表す。行列Aは次のように与えられる。
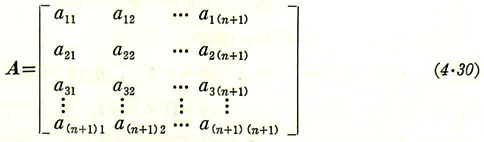
Aの要素はシステムの各要素の故障率、修復率、これらの線形結合で
与えられシステムの構成によって決まる。
対角要素ajj、j=1,2,…,(n+1)は
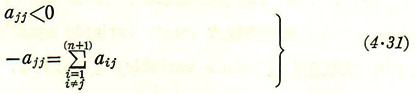
なる性質を持っている。このことより|A|=0(| |は行列式)である。
cの要素は1あるいは0の値を持つ。
確率状態方程式(4.25)、(4.26)の解は次式で与えられる。

(Iは対角要素のみ1で他はすべて0の行列で単位行列)
これより、システムの瞬時アベイラビリティあるいは信頼度の過渡現象は
![]()
で与えられる。
定常状態〔pi(t)が時間tとともに変化しない状態、t→∞で定常状態になる〕
では式(4.25)の微分項は
![]()
となるので、式(4.25)は次の連立代数方程式で与えられる。
![]()
この方程式を解くに当たり、この方程式だけでは解は唯一(ユニーク)に定
まらないので、もう一つの条件式(4.28)を導入する。
![]()
定常状態における確率状態ベクトルp(∞)は、式(4.40)、(4.41)を連立し
た代数方程式の解として与えられる。すなわち
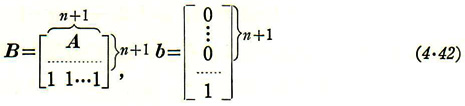
として
![]()
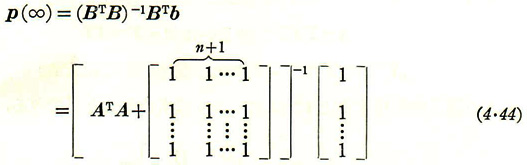
の解である。ここでこの連立代数方程式は(n+2)個の方程式にして(n+1)
個の未知数しかないが、行列Aの式(4.31)で与えられる性質から厳密な解が
求まる、解は次式で与えられる。
あるいはもっと簡単に、A行列の任意の1行を[11……1]ベクトルに置き換え、
次の方程式数(n+1)、未知数(n+1)の連立代数方程式
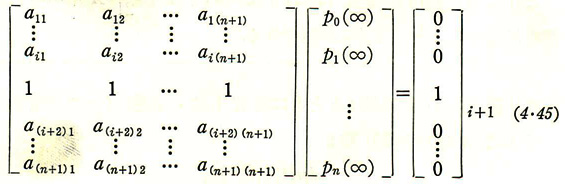
を解いても求めることができる。













