第67回の⑦,⑧で示した3自由度の遅れ・進みコントローラは広くサーボ系などで
利用される。あらためて、この伝達関数を次に示す。
![]()
ここでT1<T2のとき、進みコントローラ、T2<T1のとき遅れコントローラとなる。
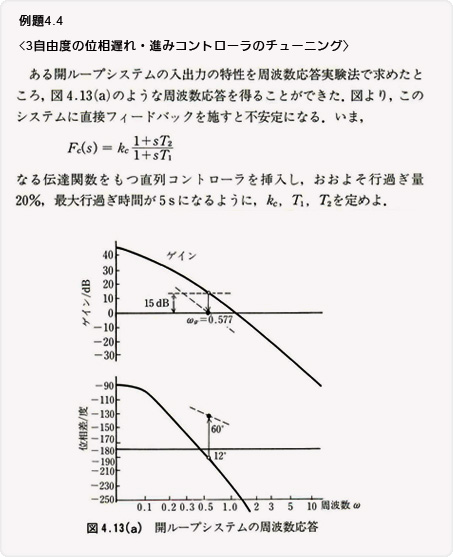
今ここでは、制御対象の特性は、開ループ周波数応答で与えられ、フィードバック系
のもつべき性能(設計仕様)は、フィードバック系に単位ステップを印加した場合の
応答の形で与えられるものとする。具体的には、フィードバック系の単位ステップ応答
の最大行過ぎ時間Tmax と最大行過ぎ量θで与えられるものとする。閉ループ周波数
応答で与えられた制御対象のもとで与えられる性能をフィードバック系がもつように
係数 kc,T1,T2をチューニングする。次の例でこの設計の手順を示す。
![]()
![]()
![]()
フィードバック系のオーパシュートθ=20%、最大行過ぎ時間Tmax=5とするために、
直列接続コントローラを入れた後の閉ループ周波数応答で、ゲイン交点、位相
余有は次のような値にならなければならない。図3.11より、
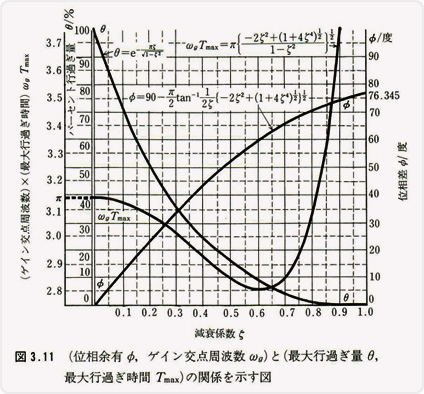
θ=20% → ζ= 0.45 → φ=48°
またζ=0.45より、図3.11を参照し、
ωgTmax = 2.88 となる。
Tmax=5であることより、
ωg = 0.576 となる。
このためにはコントローラの係数のチューニングによって周波数ω =0.576に
おけるゲインを15dBだけ下げ(0.1778倍にする)、同じ周波数で位相を48°+12°=60°
だけ上げなければならない。いまFc(s)の周波数応答は、
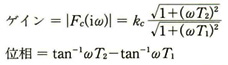
となることより上式を満たすように、kc,T1,T2を求めればよい。
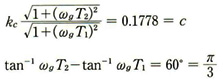
上式は、
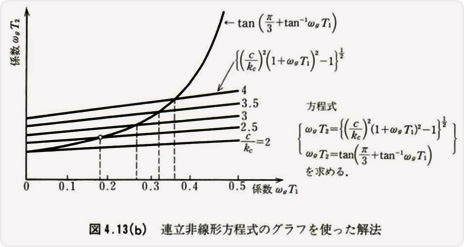
となり、上式を縦軸ωgT2、横軸ωgT1、 c/kcをパラメータとするグラフをプロットすると、
(c/kc)の値によって図(b)のように求まる。いま速度定常偏差をあまり大きくしないように、
![]()
とする。これより、
![]()
となる。また(c/kc)=2.5のときのグラフの交点より、
![]()
したがって、
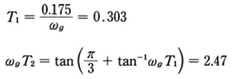
したがって、
![]()
と求まる。よって、
![]()
となる。













