PIDコントローラはプロセス制御用の調整計として広〈利用されている。
PIDコントローラを図4.l(a)のように直列に接続し、伝達関数
![]()
の係数kp,Ti, Td をうまく調節(チューニング)し、フィードパック系の性能を向上させる。
このチューニングの方法には、次の二方法が有名である。
ひとつは閉ループステップ応答を求めその波形から制御対象の特性を読みとり、
PIDコントローラのパラメータを決定する方法であり、他はPIDコントローラを制御対象に
実装して、ある手順に従ってパラメータを調整していく方法である。
①ステップ応答法
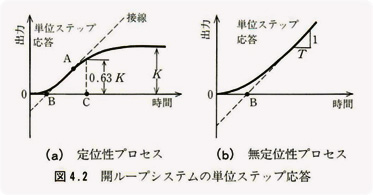
制御対象にステップ入力を印加すると、大別して図4.2(a)、(b)のような出力応答が
求められる。図4.2(a)のようにステップ応答の定常値がある一定値に落ち着くような
プロセスは定位性プロセスとよばれ、図4.2(b)のように定常値が無限大となるプロセス
は無定位性プロセスとよばれる。このようなステップ応答波形から厳密な伝達関数を
求めることは多くの処理を必要とする。そこで、この方法では図4.2(a)、(b)の波形から
簡単な伝達関数をつくり、 これで代用する。
図4.2(a)の定位性プロセスの場合には、実線のステップ応答波形の変曲点Aを求め
その点における接線を求める。接線と時間軸の交点をBとし、0Bがむだ時間の長さ
B以降を一次遅れ特性で表す。 したがって、応答の定常値をKとし、
![]() となる時点をCとし、
となる時点をCとし、
0B =L (むだ時間)
BC=T (一次遅れ系の時定数)
K (一次遅れ系の比例ゲイン)
とすると、ステップ応答が図4.2(a)で与えられる制御対象は次式のような近似伝達関数で
表される。
![]()
このとき、 PID (P、 PI、 PID)コントローラの係数kp、Td,Tiは、この推定された
制御対象の係数K、T、 Lより表4.1に基づいて求められる。
図4.2(b)の無定位性プロセスの場合には、時間が十分経過した後の直線に
漸近する線を引き、時間軸との交点をBとし、この傾きを1/Tとする。これより、
0B =L (むだ時間)
1/T (漸近線の傾き:Tは積分時間)
とすると、図4.2(b)の制御対象の伝達関数は次式で与えることができる。
![]()
このとき、PIDコントローラの係数kp、Td、Ti はこの推定された制御対象の係数
T、Lを用いて、表4.2より求められる。
②ジーグラ・ニコルスの限界感度法
この方法は図4.1(a)のようにPIDコントローラを制御対象に直列に接続し、実装した
のちのkp、Ti、Tdの調整法である。制御対象は無定位性プロセスG2(S)で近似できる
場合で、ステップ状外乱に対する応答の振幅減衰比を25%にするような調整法であり、
次の手順に従う。
①PIDコントローラを比例動作(kpのみ)にする(Ti = ∞、Td=0)。
②kpを少しずつ増やし制御システムが安定限界になるまで大きくする。
このときのkpを限界感度という。この値をKcとする。
③kpを限界感度Kcにしたときの応答の振動周期Tcを測定する。
④表4.3より、このKc、Tcのもとでのkp、 Ti、 Tdを決定する。













