開ループ単位ステップ応答実験結果による特性認知と設計
閉ループ一巡伝達関数の特性未知の場合,周波数実験法より簡単な実験による
閉ループ特性の認知法である。これはこの閉ループ系の入力に単位ステップを
印加し、出力を観測する方法である。
いくつかの伝達関数について、それらの単位ステップ応答波形と伝達関数形、
伝達関数の係数の関係はすでに第17回 伝達関数に示してある。表2.2のうち、
(比例、積分、微分、一次遅れ、不完全微分、遅れ・進み、二次遅れ、むだ時間)の
各基本要素は、フィードバック系の各サブシステムの特性を表現するのに使われ、
(積分+むだ時間、一次遅れ+むだ時間、積分+一次遅れ)の基本要素の組合せから
なる伝達関数は,よくフィードパック系の一巡伝達関数の特性を表すのに利用される。
次に、これらの一巡伝達関数にフィードバックを施した場合のフィードバック系の
特性について考える。
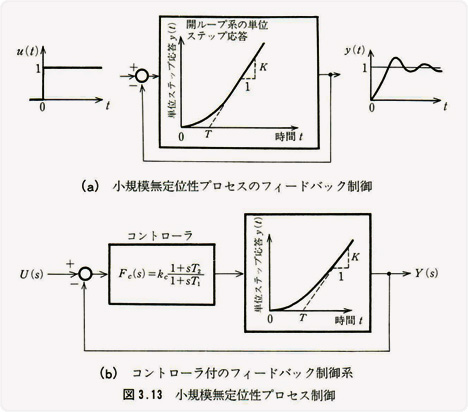
フィードバック系の閉ループ単位ステップ応答が,図3.13(a)のブロック内に示す
ように求められた。すなわち、閉ループ単位ステップ応答は無定位(出力が一定値に
とどまらない)で,単位ステップ入力印加後時聞が少し経過すると、ほぽ直線的に
増加し、この傾きがK、この直線の漸近線と時間軸との交点がTであった。このとき、
この系の伝達関数は表2.2にも示すように
![]()
このフィードパック系の入力から出力までの伝達関数は、
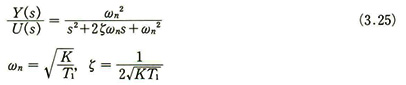
の二次遅れ系となり、 0≦ζ< 1 の場合、式(3.13)、 (3.14)より最大行過ぎ量θ
最大行過ぎ時間Tmaxはそれぞれ、

となる。今、このシステムにおいて図3.13(b)に示すように伝達関数G(S)の前に
コントローラ、
![]()
を挿入したフィードパック制御系を考える。今、このコントローラの係数のうち、
![]()
とすると、一巡伝達関数は、
![]()
となる。Fc(s)G(s)に図3.13(b)に示すような直結フィードパックを施す。開ループの
伝達関数形は式(3.24)とまったく同じであるので、入力から出力までの伝達関数は
式(3.25)とまったく同じになり、 この時のωn、ζは、
![]()
となる。コントローラの係数T1、kcの値はある範囲で自由に選べ、それに伴いωn、ζ
の値も自由に調整できる。いま、図3.13(b)のフィードパック系がPの最大行過ぎ量、
T*maxの最大行過ぎ時間をもつようにT1、kcを決めるものとする。
式(3.26)の関係を利用するとθ、Tmaxとkc、T1の関係は、
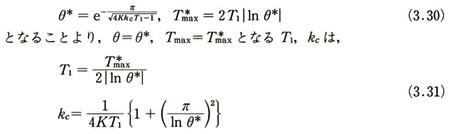
と求められる。これより、制御対象の単位ステップ応答が図3.13(a)のブロックの
中に示すような波形をもつ場合、図3.13(b)に示すコントローラを直列に挿入し
フィードパック制御する。この時、コントローラの係数を式(3.28)、(3.31)のように
選ぶとこのフィードパック系は指定された最大行過ぎ量θ*、最大行過ぎ時間
T*maxをもつ。













