さて、時刻がτだけ進み(N+1)τとなり新しいデータy(N+1)が
採取されたとする。(N+1)τは現時刻になり、このデータに対する
重みは1で、Nτ時刻以前のデータに対する重みはすべてe-ζ倍だけ
減少する。このことを考えに入れ、時刻(N+1)τにおけるデータを
利用した推定値![]() は式(7・54)と同様に
は式(7・54)と同様に
![]()
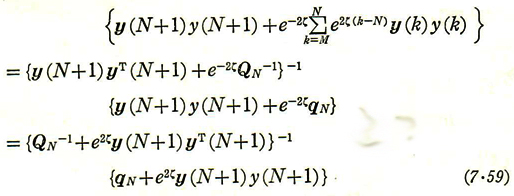
となる。上式の逆行列部をQN+1として、補4の逆行列に関する
公式をQN+1に適用する。

またqN+1を次のように定義すると
![]()
時刻(N+1)のデータを利用し更新されたAR係数は

と求められる。式(7・60)よりQN+1はQNと
ベクトルy(N+1)=[y(N)y(N-1)……y(N-M+1)]Tから求まる。
qN+1は同様にしてqNとy(k+1)、y(k+1)から逐次求めることができる。
式(7・60)においてQN、QN+1は対称行列である。したがって補助ベクトル
![]()
を挿入すると
![]()
となり、式(7・60)は次のように書き換えることができる。














