|
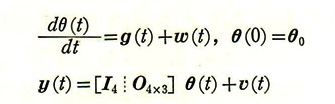
ここでΘ(t)は、この化学反応装置の状態変数と
未知パラメータからなるベクトル、g(t)は装置、
未知パラメータを連立したシステムの関数、
w(t)はシステムノイズである。
w1(t)はw1(t)=w(t)である。
w2(t)、w3(t)はそれぞれ、d1(t)、d2(t)を
測定した場合のノイズ、wh(t)、wk0(t)、
wd1(t)はパラメータh、k0、入力d1(t)に関連する
ノイズである。すべてのノイズは正規性で平均0、
互いに無相関と仮定する。wh(t)、wk0(t)、
wd1(t)の分散が大きいと、拡張カルマンフィルタの
収束速度は遅くなる。この例では観測器による
状態推定利用するので、出力測定変数は
Θ1(t)、Θ2(t)、Θ3(t)、Θ4(t)であり、
観測ノイズはv(t)とする。
化学反応装置の動特性を連立して作られる状態方程式は
次のようになる。
式(9・5)、(9・6)を利用すると、上式のシステムに対する
拡張カルマンフィルタは容易に設計できる。
故障原因の例として次のケースと想定してシミュレーションを行う。
(A)熱伝導係数hが8時間後に30%ステップ状に減少した。
(B)頻度因子k0が8時間後に20%ステップ状に減少し、
入力濃度d1(t)(=C7H16の入力濃度)が1.5時間後に10%減少した。
(C)頻度ファクタk0が8時間後に20%減少し、4時間後から12時間後に
かけてhがランプ状に30%減少した。
|













