可制御で、次の状態方程式で記述される閉ループ系を考える。

このシステムがある状態にあるとき、その状態をなるべく速くOに収束させることを
目的とする。このような制御系はレギュレータとよばれる。
いま、状態変数![]() が直接測定可能と仮定して、
が直接測定可能と仮定して、
![]()
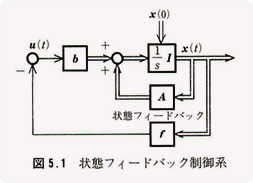
なるフィードバック系を構成する。これは図5.1に示すようにn重のフィードバックとなり、
このようなフィードバックは状態フィードバックとよばれている。式(5.5a), (5.5 b)より、
状態フィードバックを施した後の閉ループ系は、
![]()
となり、その応答は次式となる。
![]()
この式で、A-bfの固有値(特性根)の実部をすべて負にできれば任意の初期外乱
x(0)に対してx(t)→0(t→∞)となる。さらに、A-bfの固有値が複素左半面上で、より
原点から遠くに設定されれば、それだけ応答の減衰率が大きくなり、整定時聞は
短くなる。(A, b)が可制御なので第65回よりA-bfの固有値は自由に設定できる。
A-bfの固有値をμ1,μ2,… ,μnに設定するベクトルfは次の手順で求められる。
①特性多項式
![]()
よりa1~anを求め、次に、A、bより状態方程式を可制御標準形式に変換する行列
Tc(式(5.3a))を求める。
②次式
![]()
より、d1~dnを求める。
③係数ベクトル fは
![]()
で与えられる。
![]()
![]()
![]()
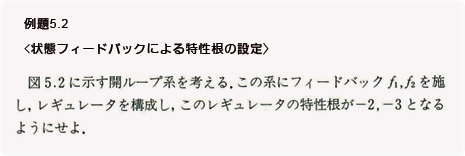
フィードバックを施す以前のこのシステムの状態方程式は、
![]()
である。たとえばx10=1、x20=0、u(t)=0とすると、この方程式の解は、
![]()
となり、状態x1(t)は一定値を保ち、x2(t)は不安定になってしまい、このままでは
レギュレータとして動作しない。図5.2の破線で示すような状態フィードバックを
施すと、入力u(t)は
![]()
となる。この閉ループ系の可制御性行列は、
![]()
となり、このランクは明らかに2であり、可制御である.上述の手順にしたがって、
状態フィードバック系の特性根が-2、-3となるようなf1,f2 を決定する。
次の特性多項式
![]()
より係数はa1= -1、 a2=0となる。よって可制御標準系に変換する行列は、
式(5.3a)より、
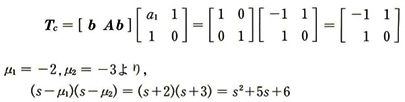
したがってd1=5、d2=6となる。
よって、
よって、この状態フィードパック後の状態方程式は、
となり、特性根はμ =-2,-3となっている。













