式(5.1a)の状態方程式の特性多項式を、
![]()
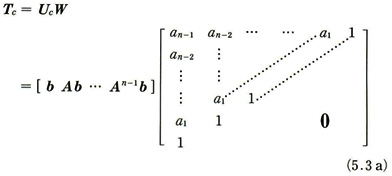
とする。特性多項式の係数 a1,a2,… ,an と可制御性行列 Ucを利用し、次のような
正方行列Tc(n×n)を定義する。
いま、この行列 Tcを利用して、状態変数x(t)を線形変換し、
![]()
とする。変数ベクトルz(t)に関する状態方程式は、

となる。このとき、変換された係数行列は、
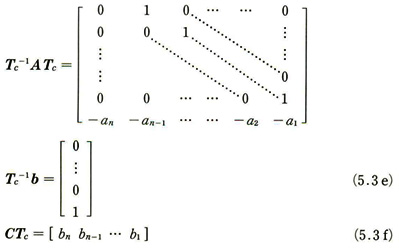
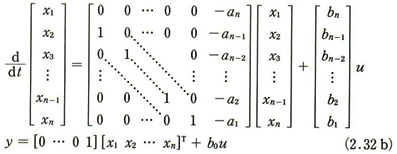
となる。したがって、この状態方程式は式(2.32b)に対応し、可制御標準形の
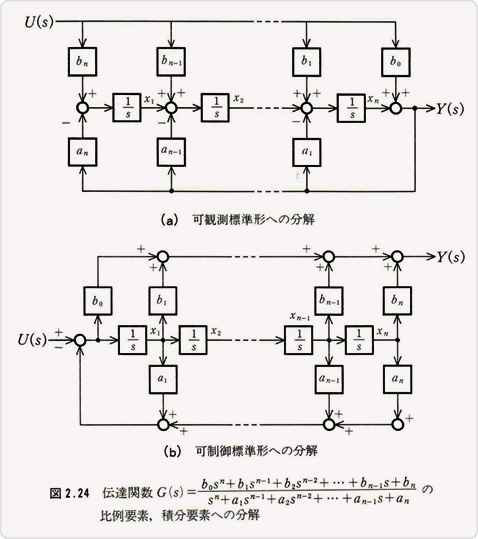
状態方程式となる.。このブロック線図は図2.24(b)に示してある。
次に、可観測性行列を利用し、次のような正方行列を定義する。
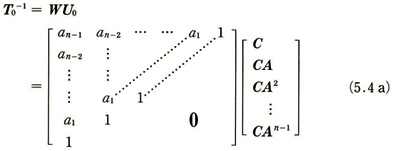
この行列を利用し、状態変数x(t)を線形変換し、
![]()
とする。この変数ベクトルに関する状態方程式は、

となる。このとき変換された係数行列は、
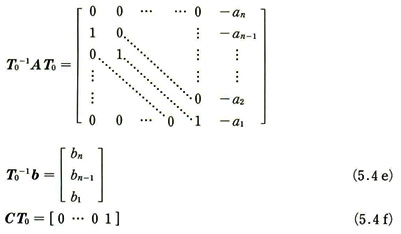
となる。したがって、この状態方程式は式(2.42b)に対応し可観測標準形の状態
方程式になる。このブロック線図は図2.24(a)に対応している。この線形変換は,
式(2.34f)に示した対角変換とともに現代制御理論ではよく利用されている。
![]()

![]()
![]()
可観測性行列Uoは、
![]()
となり、Uoのランクは2であり、可観測である。可制御性行列Ucは、
![]()
となりUcのランクは2であり、可制御である。特性多項式は、
![]()
となり特性多項式の係数は、 a1=3、a2=2となる。可観測標準形に変換するための
線形変換行列は、
![]()
となる.よって、
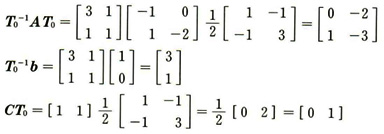
となり,
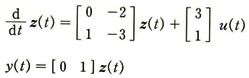
なる可観測標準形が求まる。可制御標準形に変換するための線形変換行列は、
次のようになる。
![]()
よって、
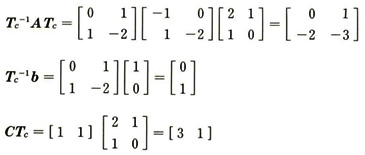
となり、
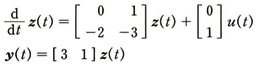
なる可制御標準形が求められる。













