状態空間法によるシステム論、制御理論に基づくレギュレータ設計問題について
考える。まだ、状態フィードバックによるシステムの特性根設定、観測器,観測器を
用いたレギュレータの設計についても説明する。
ここではシステムを第38回で述べた線形状態方程式で記述することとする。
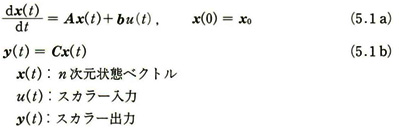
この状態方程式は1入力、 多出力の線形システムを一般的に表すことができる。
いま、このシステムは可制御、可観測であり、次の可制御性行列
![]()
のランクはn,可観測性行列

のランクもn とする。
以下(5.1a)、 (5 .1b )で記述されるシステムの制御について考える。













