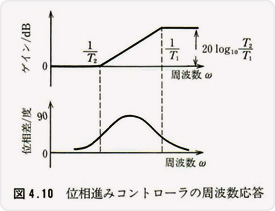
位相進みコントローラの伝達関数は第67回でも示したように,
![]()
で与えられる。この周波数応答を図4.10に示す。この図より、 1/T2-l/T1の周波数
範囲で20dB/decゲインが増加するハイパスフィルタ特性をもち、位相差は同周波数
範囲で正になる。このコントローラを図4.1(a)のように直列接続する場合のフィード
バック系の特性を考える。
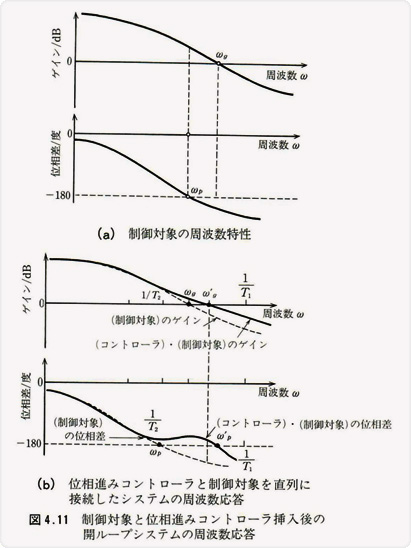
たとえば、制御対象の周波数応答が図4.11(a)で与えられるとき、位相交点
周波数ωpを1/T2<ωp<l/T1となるようにT1、T2を選ぶと、直列接続後の
開ループ周波数応答は図4.11(b)に示すように、ゲイン交点周波数は制御対象
のそれよりも高<、位相交点周波数はさらに直列接続後のゲイン交点周波数
より高〈選ばれうる。制御対象に直接フィードパックを施すと、不安定であった
のに対し、このフィードバック系は安定でかつ、応答速度を大幅に速めることが
できる。
![]()
![]()
![]()
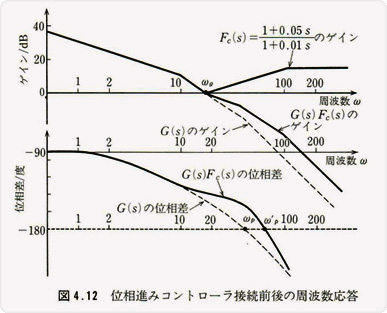
図 4.12に G(s),凡(s),Fc(s)G (s)の周波数応答を示す.この図から明らかな
ように、補償後の伝達関数Fc(s)G(s)のゲイン線図は高周波数領域では
![]() だけ高くなっている。このことは、
だけ高くなっている。このことは、
① フィードパック系の速応性をよくしている。
また、位相線図を見ると、補償後の伝達関数Fc(s)G(s)の位相交点周波数
ωp’は、 ωp よりも大きくなっている。一方、ゲイン交点周波数は変化しない。
このことは
② フィードパック系の安定性をよくしている。