![]()
![]()
① ステップ応答法
制御対象の特性があらかじめわからない系にPIDコントローラを取りつけ、系の特性
改善をはかる。制御対象の動特性を知るために系の入力に単位ステップを印加したら
図4.3のような定位性の応答が観測された.これより、伝達関数系として、
![]()
を仮定し、図4.2に示す作図法より、この伝達関数の係数は次のように求まる。
K = 1.0、 L = 2.0、 T = 5
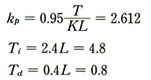
表4.1(a)の行過ぎ量なしTR最小の場合を用いて、PIDコントローラ、
![]()
の係数を決定すると、kp、 Ti、 Td は次のように求まる。
このパラメークのもとで, PIDコントローラを取りつけフィードパックを施しステップ
応答を求めたら、図4.4のように、行過ぎ量47.6%、最大行過ぎ.時間Tmax=8.8単位時聞
の応答になった.表4.1(a)は外乱に対するパラメータ調節法であるが、目標値変化に
対しても十分望ましい応答になっている。
②限界感度法
図4.3に示す単位ステップ応答をもつ制御対象に対して、限界感度法を適用する。
すなわち、PIDコントローラを取りつけ、フィードパックを施し、Ti=∞、Td=0としkpを
少しずつ増加していくと、この系はほぼkp=Kc=4.9で持続振動的になり、この応答は
図4.5のような周期Tc=10単位時間の振動波形となる.表4.3に示す係数決定法より、
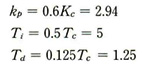
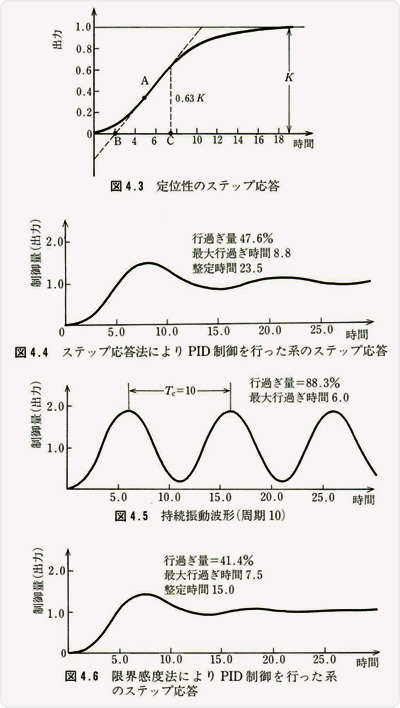
と決定される。このPIDコントローラをもつフィードパック制御系の単位ステップ応答を
図4.6に示す。この結果、最大行過ぎ量は41.4%であり、最大行過ぎ時間は7.5単位時間
であり、①の結果と応答速度はほぼ同じであるが、行過ぎ量は少なく調整されている。
なお、ここで述べる方法は本来制御対象未知で特性改善を行うものであるが、この
実験では、図4.3のステップ応答を求めたり、比例制御を施し図4.5の応答を求める
ために、次の伝達関数を採用した。
![]()













