式(2.2d)、 (2.2 e)の状態方程式
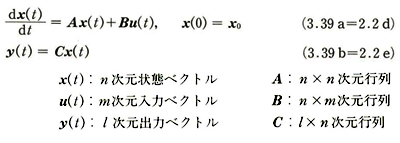
で記述されるシステムを考える。
1) 可制御性
このシステムにおいて、すべての初期値x(0)と任意に与えられたXfに対し、有限の
時刻 tfと入力u(t) 0≦t≦tf が存在し,x(tf)=xfにできるとき、このシステムは可制御
である。システム(3.39a,b)が可制御であるための必要十分条件は、次の等価な条件
のいずれかが成立することである。
① 次の可制御性行列
![]()
のランクがη である。
② 行列A-BFの固有値を任意な値μ1,μ2,…, μnにする行列F(m x n)が存在する。
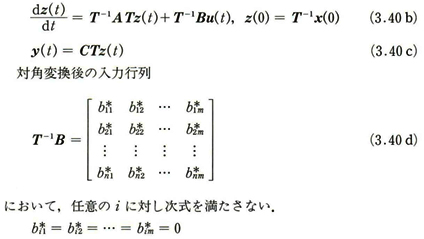
③ 式(3.39a,b)を式(2.34g)のように対角変換する。
2) 可観測性
式(3.39a,b)で記述されるシステムにおいて、すべての初期値x(0)に対して有限な
時刻 tf があり、 0≦t≦tf の区間の測定値y(t),u(t)によってx(0)が決定できるとき、
このシステムは可観測である。システム(3.39a,b)が可観測であるための必要十分
条件は、次の等価な条件のいずれかが成立することである。
① 次の可観測性行列

のランクがη である。
② A-KCの固有値を任意な値 r1,r2,…, rnにする行列K(ηxl)が存在する。
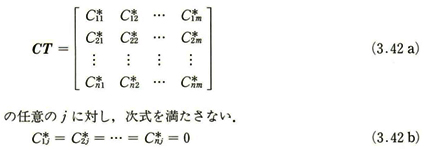
③ 式(3.40b)の対角変換された状態方程式の出力行列