![]()
![]()
このシステムの特性方程式は、
![]()
| であり、表3.2の対応では、a4=1、 a3=2、a2=3, a1=4、 a0=5であり、 これらはすべて正であり、非零である。 ラウスの数表は表3.3のようになり、 第1列目の数値は(1,2,1,- 6,5)で 与えられ、この中に異符号の数値が 含まれる。したがって,この伝達関数で 与えられるシステムは不安定である。 |
 |
![]()
![]()
![]()
このブロック線図を簡単化して入力U(s)から出力Y(s)までの伝達関数を求めると
次のようになる。
![]()
よって特性方程式は次のようになる。
![]()
この特性方程式よりラウスの数表は図3.18 (b)のようになる。
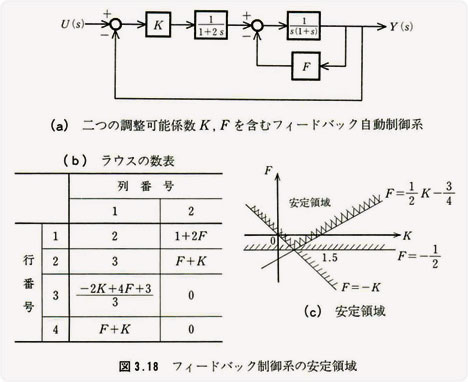
であるためにはラウスーフルビィツの安定判別法より、
![]()
かつ、ラウスの数表より、
![]()
を満たさなければならない。よって、この系が安定であるためには、K、Fは図3.18(c)
の範囲の値でなければならない。













