第32回で述べた方法でブロック線図を比例要素と積分要素に分解すると、
分解されたブロック線図より容易に状態方程式を求めることができる。
この手順は次のとおりである。
(ステップ1) ブロック線図を比例要素と積分要素に分解する。
(ステップ2) システムの入力に変数![]() ,システムの出力に
,システムの出力に
(ステップ3) 積分要素の出力に状態変数![]() を割り当てる。
を割り当てる。
(ステップ4) 入力変数![]() 、状態変数
、状態変数![]() を信号の発信源、
を信号の発信源、
状態変数の導関数![]() および出力変数
および出力変数
![]() を信号の受信源と考え、ブロック線図の約束より、
を信号の受信源と考え、ブロック線図の約束より、
分解されたブロック線図より逆に方程式を求める。
ステップ4で求まった方程式が状態方程式である。
![]()
![]()
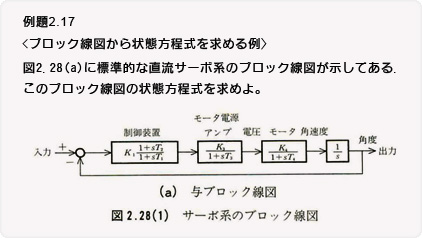
図(a)のブロック線図を表2.7(p.62)を参照しながら比例要素と積分要素に分解する。
制御装置をK1と(1+ sT2)/(1 + sT1)を分解する。
アンプ、モータの一次遅れ要素を分解する。この結果を図(b)に示す。
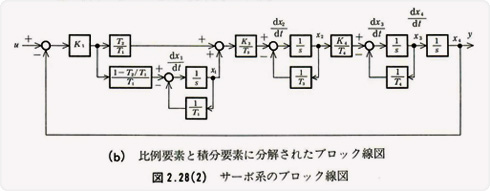
(ステップ2) 入力にu、出力にyなる変数を割り当てる。
(ステップ3) 図(b)に示すように、積分要素の出力に![]() ,その入力に
,その入力に
![]() を割り当てる。
を割り当てる。
(ステップ4)![]() では、
では、![]()
![]()
![]()
と3本のチャンネルを通してu,x1, x4で発信された信号が受信される。
ブロック線図の約束に従って、
![]()
なる方程式がつくられる。まったく同様にして、次のような方程式が得られる。
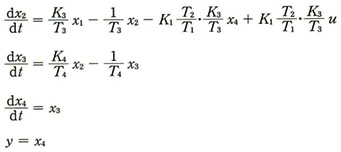
ここで、
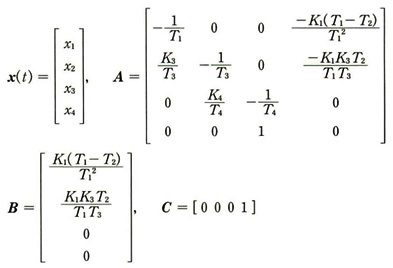
とすると、このブロック線図で与えられるシステムの状態方程式は、
と求まる。













