式(2.29b)で記述される非線形システムに一定の制御入力u0を加え、十分時間を
経過させたところ、状態x(t)は一定値ベクトルx0になった。
この状態でシステムを動作させておく。この時の入力、状態(u0,x0)はシステムの
定常動作点とよばれる。定常動作点での(u0,x0)は当然、状態方程式を満たし、
![]()
である。今、この定常動作点近傍において、この非線形系は、線形的挙動をする
ものとし、この定常動作点近傍での近似線形状態方程式を求める。
今、(u0,x0)の近傍におけるu(t), x(t)を、
![]()
とする。式(2.29b)のシステムの式f(x,u)をx=x0,u= u0のまわりでテイラー(Tay]or)級数
に展開すると、

となる。ここではδx,δuについての高次の項である。![]() はδx,δuについて
はδx,δuについて
の高次の項である。このシステムはx0,u0の近傍では線形挙動をするので、δx,δu
の小さい範囲では![]() とみなせる。
とみなせる。![]() を無視すると、
を無視すると、
![]()
となる。![]() であることより、上式は次のようになる。
であることより、上式は次のようになる。
![]()
ここで、
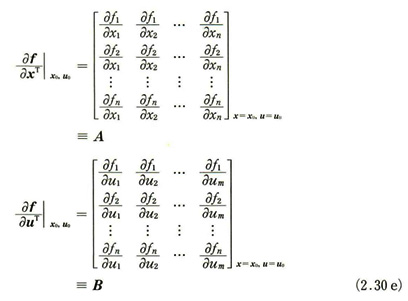
とすると、式(2.30d)は、次のようにδx,δuに関して、線形の状態方程式になる。
![]()
この方程式は、式(2.29b)で表されるx=x0,u=u0の近傍における線形挙動を表す
線形化された状態方程式である。
![]()
![]()
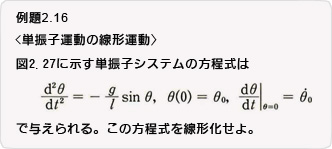
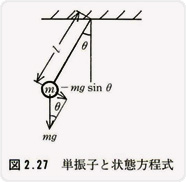
上式の二階スカラー方程式は、次のような非線形状態方程式で表現される。
 |
 |
| θ=0の近傍で線形化する。 | |
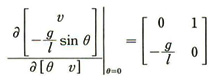 |
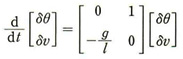
であることより、この線形化された状態方程式は次のようになる。