いま次のような行列を定義する。

ここで、F(t):(n+l)×(n×l)次元の行列で
g(x、u、p、t)のΘ(t)に対するヤコビアン、
Q:(n+l)×(n×l)次元のw(t)の共分散行列、
Rc:m×m次元のv(t)共分散行列。
各時刻で線形化されたモデルへカルマンフィルタを応用すると
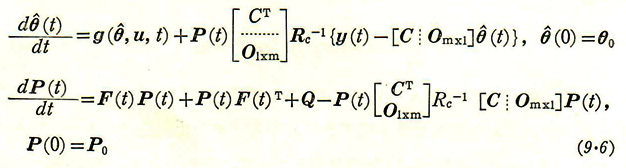
なる式を得る。
ここで![]() の推定値、
の推定値、![]() である。
である。
式(9.6)を拡張カルマンフィルタと呼び、式(9・5)、
(9・6)を連立して解くことによって推定値![]() が求まる。
が求まる。
拡張カルマンフィルタは線形システムのため
カルマンフィルタと異なり、推定値に対する最適性、
正しい推定値への収束の保証はなくヒューリスティックに
応用されるべきである。一般にQの要素の値を大きく、
Rcの要素の値を小さく選ぶと、うまくいく場合で収束は
速くなるが、悪くすると振動的になったり発散したりする。
逆に小さく選ぶと収束は遅くなるが、ある点に
安定に収束していく。また![]() の初期値推定(initial guess)の
の初期値推定(initial guess)の
精度が良ければ良いほど他qだしい値に収束する傾向が
強くなる。式(9・1)で記述されるシステムに、8・2・1、
8・2・3で述べた状態観測器が適用できる場合、
はじめこれらの状態観測器で全状態を推定し、
この全状態をシステムからの出力と考えカルマンフィルタの
入力として利用する方法が正しい値に速く収束する傾向が強い。













