(1)繰り返しパラメータ最適化法
測定された入力u(t)に対し測定された出力をy(t)とする。
いま同じ入力に対し、ある適当なパラメータpのもとにおける
出力応答[これは式(9・1)を解くことによって求めることが出来る]を
r(p,t)とする。r(p,t)はパラメータpによって変化するので、
r(p,t)はベクトルpのm次元ベクトル関数である。
ベクトルr(p,t)が測定値y(t)に等しくなる、すなわち
y(t)=r(p*,t)
となるようなp*が存在すれば、このパラメータp*が求めるべき
パラメータである。そこで(最適)パラメータP*は
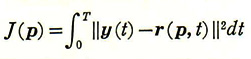
なるスカラー関数J(p)を最小にするpを求めればよいことになる。
ここで、r(p,t)は上述のように
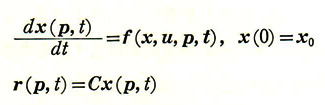
の方程式から求まるベクトル時間関数である。
このようにパラメータ推定問題を関数J(p)を最小にする
極地探索問題に置き換える方法が、繰り返しパラメータ最適化法である。
最適化手法としてNewton-Raphson法、Davidon-Flecher-Powell法などあるが、
推定計算のための計算機プログラムは複雑で多くの計算量を必要とする。













