9・1 パラメータ推定法
システムの故障、異状の原因はシステムを構成する要素、
部品のパラメータ変化としてとらえることができる〔図1・1(b)参照〕。
どのパラメータがそれだけ変化したかが分かれば、
かなり詳細にシステムの異状の原因を追究することができる。
システムのパラメータ推定問題は古くから制御工学などの
分野で取り扱われてきており種々の方法がある。
いま考えるシステムが
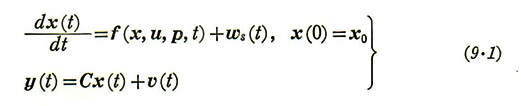
で記述されるものとする。
ここで、x(t):n次元状態ベクトル、x0:x(t)の初期値、
u(t):s次元入力ベクトル、y(t):m次元出力ベクトル、
f(・):n次元非線形システム関数、p:l次元道パラメータ、
v(t):m次元の平均oの正規性観測ノイズ、C:m×n次元定係数出力行列、
ws(t):n次元の平均oの正規性システムノイズ、である。
このシステムより入力変数u(t)、出力編集y(t)を測定し、
この測定量からあらかじめ予想される故障と
それに伴い変化するであろうパラメータpを
推定する問題を考える。このようなパラメータ推定の
問題に対するアプローチとして次のような方式が考えられる。













