フィードバック制御システムとは、図1.6に示すような信号流れをもつシステム
です。この信号の流れ方の特徴は、出力(結果)を入力(原因)側に戻していること
です。つまり、結果を検出してそれを原因側に返し、より良い入力信号をつくり出す
信号流れ構造になっています。
もちろん原因を結果に戻しさえすれば常に良い制御が保証されているわけでは
ありません。与えられる入力と検出される出力の信号に適当な細工を施すことで、
はじめて良い制御が可能になるのです。
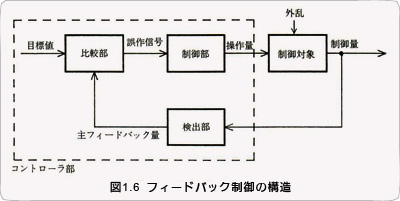
フィードパック制御システムの各部には図1.6に示すような名称がつけられており、
次のような意味を持っています。
①目標値
フィードパック系への入力。制御量(出力)の目標となる値であり、一定に保つ
場合、変化させる場合があります。
②制御量
フィードパック系からの出力です。この信号を目標値に一致させることが、この
制御系の目的になります。
③誤差信号
(目標値)-(制御量)で与えられます。
④操作量
誤差信号を制御部に送り込み変形を与え(フィルタリング) した結果です。
一般に操作量のパワーレベルは高い。
⑤外乱
制御対象に加えられる予測できない外乱。
⑥主フィードバック量
制御量を検出器で検出し入力側に戻される信号。
⑦比較部
目標値と検出部で検出された主フィードパック量(信号)を比較し、誤差信号を
出力する部分。
⑧制御部
コントローラあるいは制御器とも呼ばれます。誤差信号にある変形を加え全体の
制御システムが望ましい動作をするようにします。
制御系の設計の主たるものは、この制御器の伝達関数の決定であると言えます。
⑨制御対象
制御されるべき対象です。この制御対象単独では望ましい性能を得ることが
できない場合、図1.6のようにフィードパックを施して系金体としての性能の向上を
はかります。
⑩開ループ
フィードパックループを切り開いた信号流れ系。
⑪閉ループ
フィードパックのようなループの存在する信号流れ系。
⑫一巡伝達関数
信号がフィードパックループを一周する間に信号の受ける変形のようすを示す
関数です。例えば、図1.6において目標値をOとして、比較部と制御部を結ぶ
信号線を切断して、制御部に入力される信号が比較部の出力に至るまでどの
ように変形を受けるかを示す関数です。
関数はラプラス(Laplace)変換形で与えられます。伝達関数については、次の章で
詳しく説明しています。
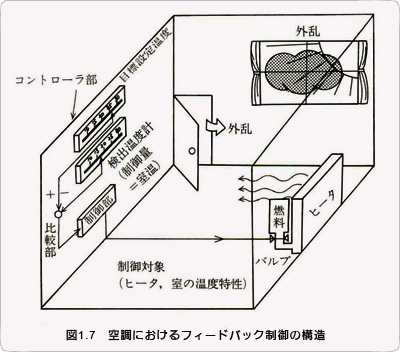
図1.7は空調(室温制御)の例であり、図1.6に対応することを示しています。













