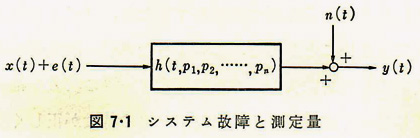
図7.1に示すようなシステムを考える。
ここで
y(t):システムから測定される量,y(t)は異状入力、すべての故障,測定
ノイズの影響を受けるものとする。
h(t,ρ1,ρ2,……,pn):システムの特性を表すインパルス応答関数で未知
とする。ρ1,ρ2,……,pnはシステムのパラメータである。これらの値は
故障により正常値ρ1*,ρ2*,……,ρn*からずれ、ずれの量は未知とする。
x(t)+e(t):システムヘの入力である。x(t)は制御入力で既知な確定的
信号とする。e(t)は異常入力で未知とする。
n(t):測定ノイズであり統計的に定常(補2参照)でその性質は不変とする。
システム:y(t)が装置の状態量(例えばモータの場合、回転子に流れる電流)
であれば、システムは装置そのものでh(t,ρ1,ρ2,……,pn)は装置の動特性を
表す。y(t)が装置の故障に直接かかわる変量(例えばモータの場合、軸受から
発生する音響信号)の場合、h(t,ρ1,ρ2,……,pn)は故障信号発生メカニズム
である。両者の場合が考えられる。
いま図7.1のシステムでy(t)とx(t)+e(t)が線形関係とするとy(t)、n(t)、
x(t)+e(t)の間に、正常な場合、異状な場合、次のような関係がある。
異状が発生した場合
![]()
正常な場合
![]()
で与えられる。式(7.1)、(7.2)の積分はたたみ込み積分と呼ばれ、
システムの特性h(t,ρ1,ρ2,……,pn)と入出力の関係を記述するものである。
ここで考える問題はシステムがh(t,ρ1*,ρ2*,……,ρn*)からh(t,ρ1,ρ2,……,pn)へ
移行したか否かを測定データから判定する問題である。ya(t)とyn(t)を直接
比較するのでは故障による出力変化がゆるやかすぎたり、ノイズに乱されて
それらの違いを見いだせないことがある。そこで,はじめにスペクトル解析法
を応用する方法について述べる。













