システムの故障特性を故障率λ(t)で表す。故障が起こったら、それを修復
するわけであるが、その修復特性(能力)を修復率μ(t)で表す。この場合の
システムの信頼性の確率(アベイラビリティ)を求めてみる。
まず幾つかの変量を定義しておく。
いま故障は保全に独立して発生するものとすれば、微少時間⊿tにおける
P0の確率P0(t+⊿t)は次のように与えられる。
![]()
この式の右辺第1項は次のことを意味する。⊿tの間に起こる故障の確率は
λ⊿t(故障率λの定義より)であり正常である確率P0(t)は、⊿t後にP0λ⊿t
だけ減りP0(1-λ⊿t)となる。第2項は修復によりP1(1-λ⊿t)だけ正常の
確率が増えたことを意味している。時刻t+⊿tにおいて故障状態にある確率
も全く式(4.10)同様にして次のように求めることができる。
![]()
式(4.10)、(4.11)の両式の両辺を⊿tで割り、⊿t→0とすると上の2式は
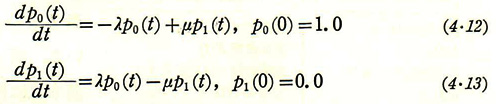
なる連立常微分方程式で記述される。初期値はt=0で故障がないものとして、
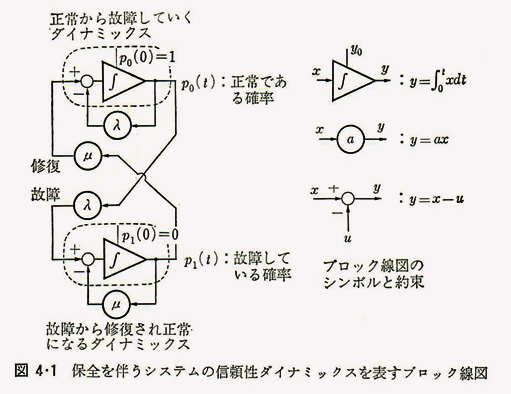
上式のように与えられる。いまλ、μを定数とする。式(4.12)、(4.13)を
ブロック線図で表現すると図4.1のようになる。この図で「正常から故障していく
ダイナミックス」部分は、故障状態から修復されてきた正常の確率μP1(t)から
正常から故障に陥っていく故障の確率λP0(t)を差し引き、これを積分すると
正常状態に保たれる確率になることを示している。式(4.12)、(4.13)の解は
次のように求まる。
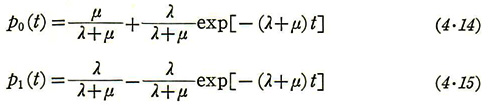
ここで、P0(t)は時刻tにおけるアベイラビリティで瞬時アベイラビリティ
(instantaneous availability)と呼ばれる。保全がない(μ=0)場合、P0(t)
は信頼度と呼ばれた。保全がある(μ≠0)場合の瞬時アベイラビリティP0(t)
と保全がない(μ=0)場合の信頼度を図に示すと図4.2のようになる。
これらの図より保全のない(μ=0)場合
![]()
保全がある(μ≠0)場合
![]()
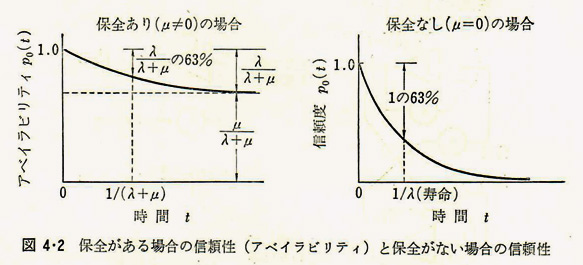
となる。システムを使用し始め十分時間が経過すると、保全なしでは寿命がきて
システムは全く使用不能になるのに対し、保全がある場合、アベイラビリティ
μ/(λ+μ)で使用され続ける。P0(アベイラビリティ、信頼度)の低下の速度も
保全がある場合の方が遅い。
保全がある場合のP0(∞)は定常アベイラビリティ(stationary availability)と
呼ばれている。定常アベイラビリティは

と書け、平均故障率(MTBF)と平均修復時間(MTTR)を用いると

で表され、この式を変形すると次のようになる。

ここで,ρは保全係数(maintenance coefficient)と呼ばれ、この係数は
重要な問題を提起している。すなわちシステム運用上許容される最下限
のアベイラビリティが指定された場合、これを実現するためにシステム固有
の信頼性(MTBF)とシステムの保全(MTTR)をどのように分担するかで
ある。式(4.20)でAが指定されると最右辺のρは一定値となり、MTBFが
短ければ,MTTRも短くしなければならず、その逆も成り立つ。MTBFを
長くしようとすれば、信頼性の高い部品を使用することになり、システムの
初期コストが高くなる。信頼性に対する部品のコストは、部品の種類に
よっても異なるが、信頼性の2乗、3乗あるいは指数関数的に増加する。
MTTRを短くしようとすると保全の体制を強化しなければならず、その費用
がかかる。すなわち、保全要員の増員、故障発見と修復時間短縮のための
訓練。異状検知・診断装置の導入を行わなければならず、人件費を含む
メンテナンスコストが増える。したがって、信頼性を高めること(MTBFを
長くすること)と保全性を良くすること(MTTRを短くすること)の間にコスト
的に最適な分担(トレードオフ)がある。













