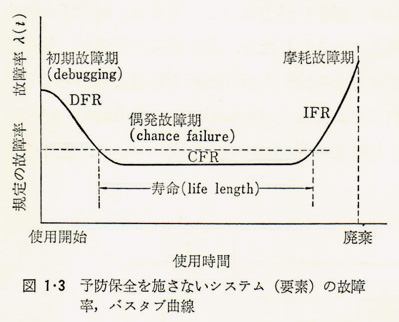
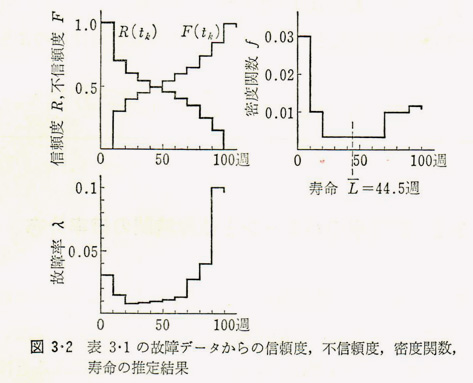
図1.3および図3.2の故障率のグラフに示したように、故障率のパターンは、
バスタブ曲線で与えられる。部品使用開始直後の初期故障期は高い故障率から
故障が時間とともにデバッグにより減少し、偶発故障期に入るとほぼ一定の故障率
を保ち、摩耗故障期では部品の摩耗、疲労による劣化で故障率が時間とともに
増加していく。
このように故障率の時間変化は次の三つの基本パターンに分類されている。
(1)故障率が時間とともに減少するパターン.これをDFR(Decreasing
FailureRate)と呼ぶ。
(2)故障率が時間とともに変化せず一定値を保つパターン.これをCFR
(ConstantFailureRate)と呼ぶ。
(3)故障率が時間とともに増加するパターン.これをIFR(Increasing
FailureRate)と呼ぶ。
このような故障率パターン、故障時間の密度および不信頼度を表すために、
確率の分野でよく知られている確率分布関数が利用されている。すなわち
(故障時間の密度)を表すのに(確率密度関数)
(不信頼度)を表すのに(確率分布関数)
(信頼度)を表すのに{1-(確率分布関数)}
(故障率)を表す‘のに(確率密度関数)/{1-(確率分布関数)}
が用いられる。以下最もよく使われる正規分布、指数分布,ワイプル分布、
ガンマ分布について述べる。このような確率分布関数を利用すると、この分布
関数に含まれる一つあるいは二つの母数を推定するだけで、故障解析に必要
な基本量が求められる。













