|
さらに異状の原因を調べるために式(8・49)の観測結果を
利用して、次の二つの特別な観測器を作る。いま
故障(A)、(B)が起こる可能性があるにもかかわらず
Ra、La、Mは正常の値を持つものと仮定する。
式(8・49)の正しい推定値 、測定値ωr(t)を用いて、 、測定値ωr(t)を用いて、
式(8・49)の場合と全く同じ手順で観測器を設計する。
観測器は次のように設計される。
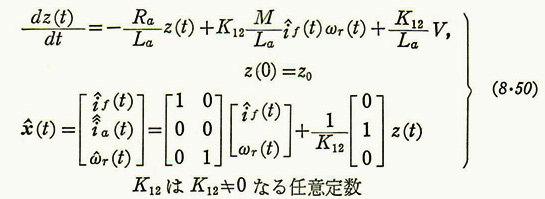
この観測器よる改めてia(t)が推定される。
観測器式(8・49)からの正しい推定値 と、 と、
Ra、La、Mが正常な値を持つときのみ正しい値を
推定する観測器式(8・50)のia(t)の推定値 の の
差をeia(t)とする。

Ra、La、Mが正常値を持てばeia(t)=0である。
故障によりRa、La、MがそれぞれΔRa、ΔLa、ΔMだけ
変化したとすると

となる。
|













