|
式(8・29)、(8・30)、(8・33)および式(8・35)より

K11はK11≠0なる任意定数
となり、上の行列を用いて線形変換したモータの方程式より
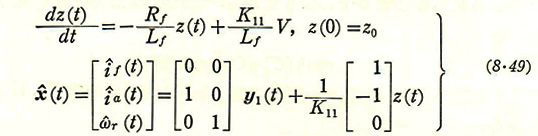
が求められる。F(x、u、pk、t)=Rf/Lfであることより
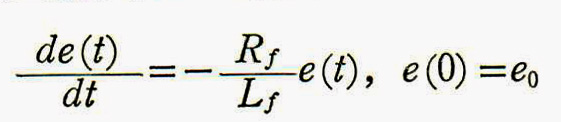
は常に安定である。しがかって、式(8・49)はモータ式(8・48)の
観測器である。したがって出力の測定量(ωr、ia+if)より、
この観測器を用いて(ωr、ia、if)が推定される。
すなわち、この観測器はモータに流れ込む全電流ia+ifをiaとifに
分離することができ、これよりモータ中に起こる異状を
検知することが出来る。
|













