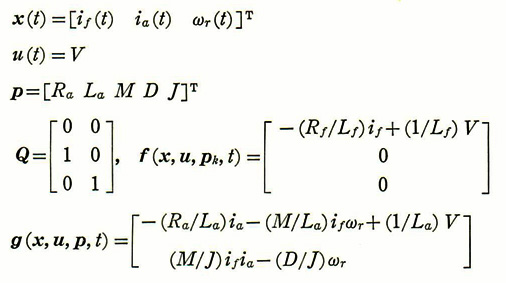
励磁回路は固定子側にあり故障する確率は低く正常と仮定する。 したがって、このモータにおける未知パラメータは Ra、La、M、D、Jである。 いま
とすると、このモータの状態方程式は
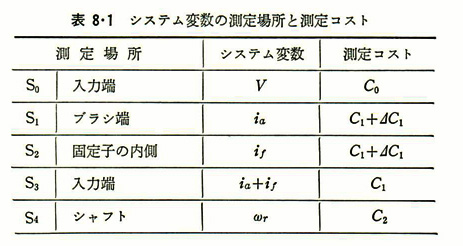
で与えられる。いま、このモータから直接測定できるシステム変量は、
表8・1に示すような変量である。入力u(t)=Vは常に測定する、
rank[Q]=2≦m
より最小の測定点数(m=2)で考えられるすべての測定の組を コストの低い方から並べると表8・2のようになる。 これらの出力列Cのランクは全て
rank[C]=2=rank[Q]
である条件(1)、式(8・41)を満たす。
当社の製品カタログ(PDF形式)をダウンロードできます。
測定対象や用途などからぴったりの機種を選定できます。