メカニカルオー卜メーションとは、機械的製品を生産するラインの自動化のことを
意味します。
代表的な例は、自動車の生産ラインに見ることができる。 この分野で取り扱うものは
非連続物体(ボルト、ナット、抵抗器、コンデンサなど)であることが多く、プロセス制御
で取り扱う連続体とは基本的にその取り扱いが異なり、バルブの開閉のような簡単な
操作による制御ができません。
従って、この分野の自動化はプロセスの自動化に比べてほぼ10年から20年遅れ、
1970年中期から1980年にかけて実用化が図られました。メカニカルオートメーション
における主役たちはNCマシンや産業用ロボットが挙げられます。
フィードパック制御は、これら主役たちを実現するために応用されています。
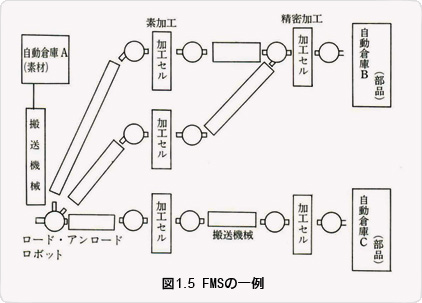
図1.4に関節型および円筒座標型ロボットの例を示しています。関節型ロボットは関節
A、B、C、Dの回転角度を正しく調節することでロボットハンドを所定の位置に移動させる
ことができます。
この回転角度制御にフィードパック制御が応用されています。NCマシンの中では、
工具を所定の位置に、所定の精度で移動するためにフィードパック制御は欠かすことの
できない技術です。
産業用ロボットの腕には何個かのサーボ系が用いられています。この分野では、
NCマシン、ロボットを活用して製造の自動化はほぼ完成されており、 FMS
(flexible manufacturing system)と呼ばれ、実用に供されています。しかしながら、
組立作業に関しては、いまだ完全自動化には至っておらず、現在、盛んに研究が
進められているところです。
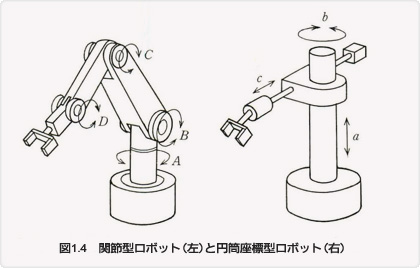
図1.5はFMSの一例です。自動倉庫Aで取り出された素材を搬送機械で搬送します。
素材はロード・アンロードロボットで適切な加工セルに別の搬送機械で搬送され、
加工後次のセルに送られます。このように加工された素材は部品となり、自動倉庫
B、Cに格納されます。